8. AI大模型应用课程
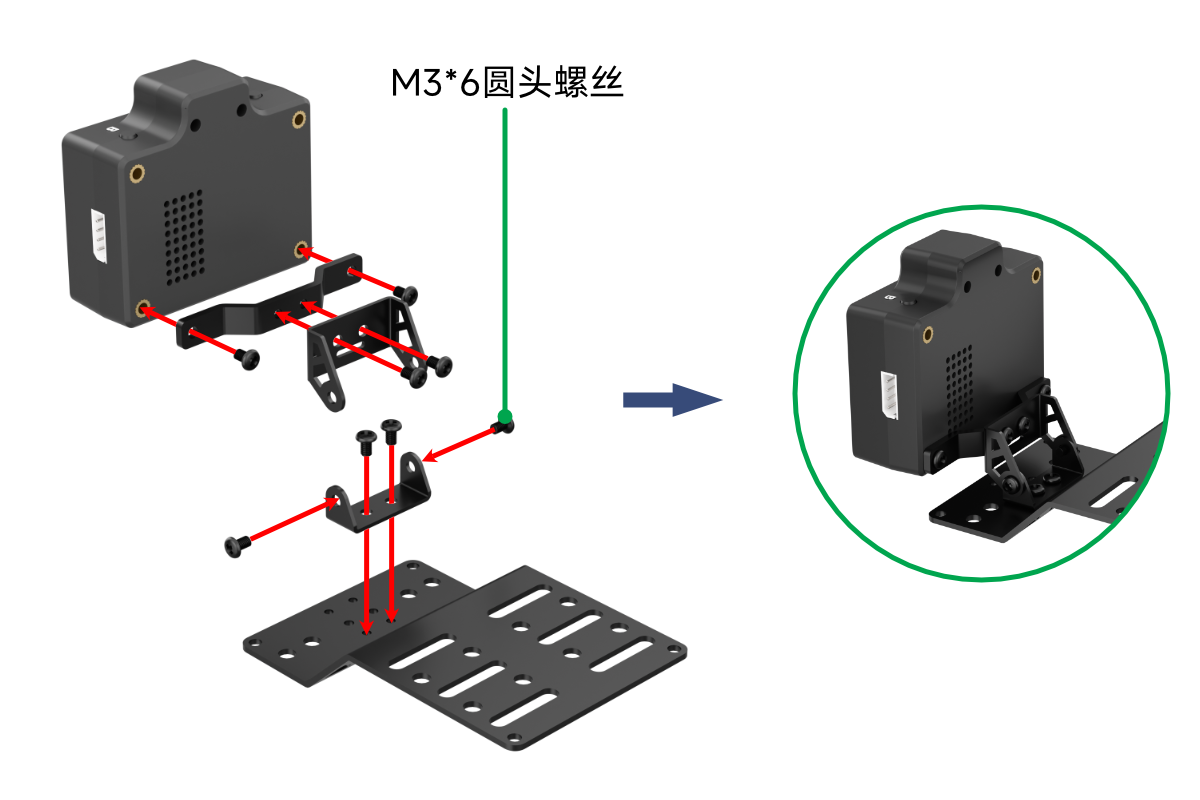
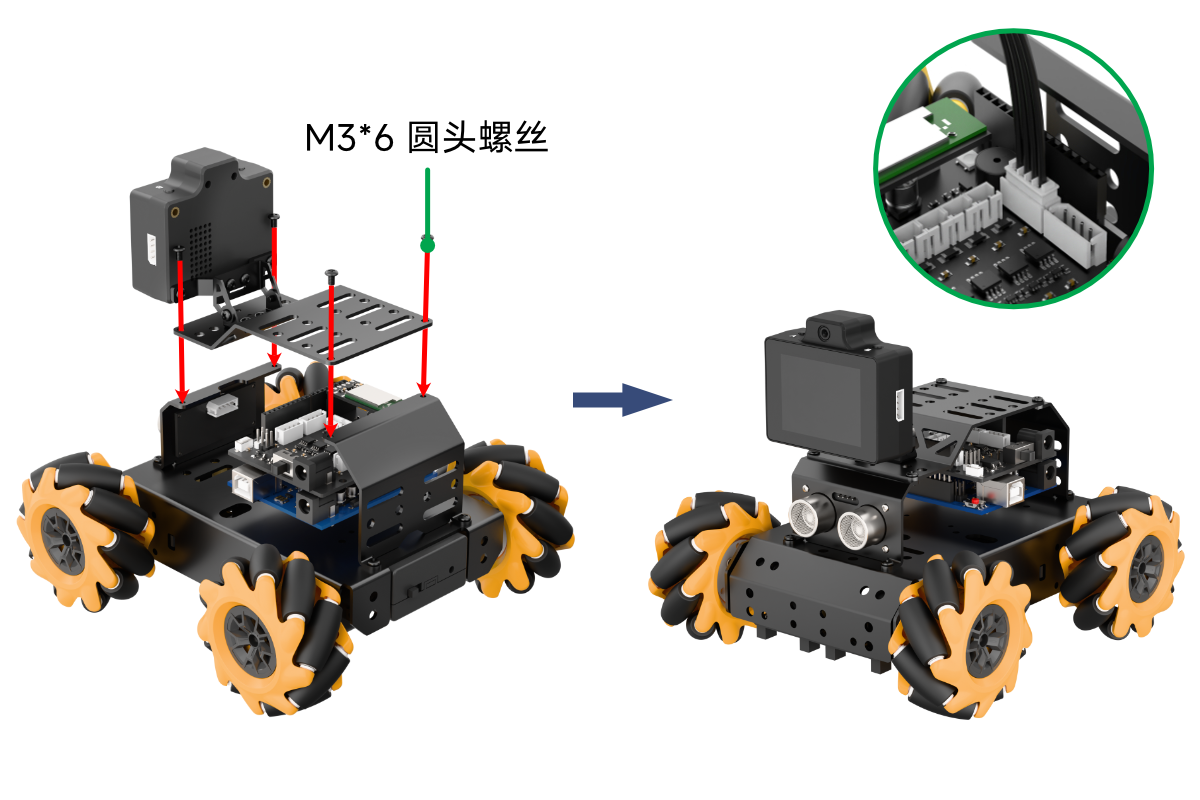
8.1 WonderLLM大模型模块安装
8.2 WonderLLM大模型模块模式说明
WonderMind模块支持两种工作模式,分别是离线模式和在线模式,两种模式的功能不同,需要烧录对应的固件。本章内容使用的工作模式是在线模式。
NOTE
WonderLLM大模型模块出厂烧录的是在线模式的固件,若在学习本章前烧录了离线模式的程序,请前往”7. AI大模型基础课程->7.10 固件下载“重新下载固件。
8.2.1 离线模式
在离线模式中,模块通过内置的摄像头模块进行图像采集,利用ESP32-S3微控制器对图像数据进行处理,能够实现图像回传、颜色识别、人脸识别、视觉巡线等功能,并且可以通过多种通信协议传输数据。
想要了解更多离线模式玩法,请前往”9.AI大模型离线课程“学习。
8.2.2 在线模式
在线模式支持AI大模型语音交互,采用口令模式唤醒,用户需要说出唤醒词来唤醒WonderLLM,激活后才可以进行人机交互。默认唤醒关键词为"小幻小幻",如需更换唤醒词,请前往”7.AI大模型基础课程->7.9 唤醒词修改“。
模块识别到唤醒词后,蜂鸣器将会鸣响一声,随后即可开始与用户交互。模块支持中英文任一语种交流,并会根据用户发言,自行识别语种并切换。若1分钟内无识别到语音,则会进入休眠模式,再次使用需要重新唤醒。
8.3 语音控制
8.3.1 项目介绍
本节通过WonderLLM视觉模块,语音控制miniAuto执行相关指令。
8.3.2 实现流程图

8.3.3 程序下载
NOTE
- 下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
- 接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
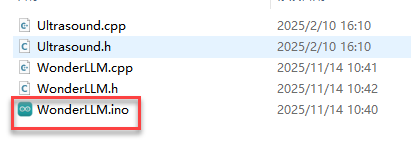
找到并打开“02 程序文件\WonderLLM\WonderLLM.ino”。
将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击左侧的库管理,导入PID库文件(如果已安装,可跳过此步骤)。
点击
 ,将程序下载至Arduino中,等待下载完成即可。
,将程序下载至Arduino中,等待下载完成即可。

8.3.4 实现效果
通过WonderLLM视觉模块,可以语音控制miniAuto AI的蜂鸣器鸣响,miniAuto AI爪子张合,RGB颜色变化,前进后退,左右转,左右平移,模式切换,获取超声波距离。
| 序号 | MCP工具名称 | 说明 | 调用示例 |
|---|---|---|---|
| 1 | 蜂鸣器控制 | 控制平衡小车的蜂鸣器时调用这个工具。'buzzer'是蜂鸣器响的次数 | 控制蜂鸣器响2声 |
| 2 | 移动控制 | 控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括前进后退,左转右转,左平移右平移,time参数为运动时间,单位是厘米(cm),正数前进,负数后退。 | 小车前进5秒钟 |
| 5 | RGB灯控制 | 设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255 | ①控制左侧RGB灯亮纯绿色 ②控制两侧RGB灯红光亮度0,绿光亮度255, |
| 4 | 模式控制 | 切换平衡小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。 | 切换为智能避障模式,避障距离设置为20cm。 |
| 5 | 获取超声波距离 | 获取超声波的距离时调用这个工具。 'distance'单位为厘米"," | 获取超声波距离 |
| 6 | 机械爪控制 | "控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。"," | 机械爪动两下 |
8.3.5 程序分析
以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 导入库文件
导入玩法所需的舵机控制库,IIC通信库,超声波模块控制库,以及WonderLLM模块的通讯库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include <Wire.h>
#include "Ultrasound.h"
#include "WonderLLM.h"- 定义全局变量及引脚
- 分别定义了状态标志变量,运动控制变量,时间控制变量,电压检测变量。
typedef enum {
NEXT_ACTION_NONE,
NEXT_ACTION_START_LINE_PATROL
} NextAction;
static NextAction next_action_on_move_finish = NEXT_ACTION_NONE;
bool is_moving = false; // 标志位,表示当前是否正在执行移动指令
unsigned long move_start_time = 0; // 移动开始的时间戳 (millis)
unsigned long move_duration_ms = 0; // 需要移动的总时长 (毫秒)
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t line_patrol_flag = 0;/* 巡线模式开关标志位 */
static uint8_t normal_flag = 0; /* 正常模式开关标志位 */
static uint8_t move_flag = 0; /* 移动标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static unsigned long last_poll_millis = 0;
#define POLL_INTERVAL_MS 100
#define RX_BUFFER_SIZE 128
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */- 分别定义了LED指示灯引脚,蜂鸣器控制引脚,舵机控制引脚以及电机速度和方向的控制引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 非阻塞控制状态机
包括蜂鸣器状态控制以及舵机状态控制。
// 非阻塞蜂鸣器状态
bool is_beeping = false;
int beep_times_left = 0;
unsigned long beep_next_change_time = 0;
bool beep_state_is_on = false; // 当前是否在发声
// 非阻塞舵机状态
bool is_servo_acting = false;
int servo_actions_left = 0;
unsigned long servo_next_change_time = 0;
bool servo_state_is_open = false; // 当前是否是张开状态- 硬件初始化
对串口,RGB灯,舵机,电机,WonderLLM模块以及蜂鸣器进行初始化。
void setup() {
Serial.begin(115200);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
delay(2000); /* 等待WonderLLM开机*/
WonderLLM_Init();
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);
}- 主循环loop()
在主循环中不断轮询和处理来自WonderLLM的指令。
void loop() {
// 在主循环中不断轮询和处理来自WonderLLM的指令
WonderLLM_Poll_And_Process();
updateCarMove();
Aovid();
Tracking_Line_Task();
if ( !is_servo_acting) {
Velocity_Controller(car_derection, speed_data, car_rot);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转)。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值。
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 };
// 修复了循环变量未初始化的bug
for(uint8_t i = 0; i < 4; ++i)
{
if(motors[i] < 0) {
direction[i] = !direction[i];
}
digitalWrite(motordirectionPin[i], direction[i]);
// 调用新的多通道软件PWM函数
PWM_Out_MultiChannel(i, motorpwmPin[i], abs(motors[i]));
}
}- 循环接收指令
每隔一段时间才检查一次上位机是否有新指令。
void WonderLLM_Poll_And_Process(void) {
if (millis() - last_poll_millis < POLL_INTERVAL_MS) {
return;
}
last_poll_millis = millis();定义接收缓冲区,用于存放接收到的 JSON 数据。
char rx_buffer[RX_BUFFER_SIZE];
uint16_t received_len = 0;通过 IIC 接口调用 receive_frame(), 从WonderLLM模块读取数据帧。
if (receive_frame(rx_buffer, RX_BUFFER_SIZE, &received_len)) {确保接收数据是有效的字符串(结尾加 \0),并调用 parse_command_manual() 解析 JSON 命令并执行动作。
if (received_len > 1) {
rx_buffer[received_len] = '\0'; // 确保是有效的C字符串
parse_command_manual(rx_buffer);
}
}- 手动解析JSON指令
用户对WonderLLM模块说出语音指令,WonderLLM模块转换为JSON。
- 查找 buzzer 字段并把后面的数字当作次数
atoi(),调用beep()函数驱动蜂鸣器鸣响。
strcpy_P(keyword_buffer, KEY_BUZZER);
if (strstr(json_str, keyword_buffer)) {
char* p = strstr(json_str, keyword_buffer);
if (p != NULL) {
p += strlen_P(KEY_BUZZER);
int beep_count = atoi(p);
beep(1500, beep_count, 100, 100);
WonderLLM_Send_Action_Finish();
return;
}
}- 解析移动方向字符串move与运行时间time(秒),调用
startMoveCar()函数启动移动。
strcpy_P(keyword_buffer, KEY_MOVE); // 使用字符串字面量更清晰
char time_key_buffer[10];
strcpy_P(time_key_buffer, KEY_TIME);
if (strstr(json_str, keyword_buffer) && strstr(json_str, time_key_buffer)) {
char* move_p = strstr(json_str, keyword_buffer);
char* time_p = strstr(json_str, time_key_buffer);
if (move_p != NULL && time_p != NULL) {
// 解析方向
move_p += strlen(keyword_buffer); // 跳过 "move":"
char* end_quote = strchr(move_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - move_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, move_p, len);
}
}
// 解析时间
time_p += strlen(time_key_buffer); // 跳过 "time":
int move_time_sec = atoi(time_p);
unsigned long move_time_ms = move_time_sec * 1000;
if (strlen(direction_buffer) > 0 && move_time_ms > 0) {
startMoveCar(direction_buffer, move_time_ms, 50);
return;
}
}
}- 解析状态获取指令。
// --- 解析: 获取状态 ("status_name") ---
strcpy_P(keyword_buffer, KEY_STATUS);
if (strstr(json_str, keyword_buffer)) {
char* status_p = strstr(json_str, keyword_buffer);
if (status_p != NULL ) {
status_p += strlen(keyword_buffer) + 1; // 跳过 "status_name":"
char* end_quote = strchr(status_p, '"');
if (end_quote != NULL) {
*end_quote = '\0';
getStatus(status_p);
*end_quote = '"';
return;
}
}
}- 解析舵机动作,调用
myservo.write()函数并通过控制舵机角度来实现机械爪张合以及物品抓取。
// --- 解析: 舵机 (寻找 "servo":) ---
else if (strstr(json_str, "\"servo\":")) {
is_servo_acting = true;
char* servo_p = strstr(json_str, "\"servo\":\"");
if (servo_p != NULL) {
// 解析动作
servo_p += 9; // 跳过 "servo":"
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
}
}
// 解析次数
int count = 1;
char* count_p = strstr(json_str, "\"count\":");
if (count_p) {
count_p += 8; // 跳过 "count":
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 90;
const int SERVO_CLAMP_ANGLE = 100;
if (strstr(action_buffer, "open") || strstr(action_buffer, "lay_down") ) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (strstr(action_buffer, "close")) {
myservo.write(SERVO_CLOSE_ANGLE);
}else if (strstr(action_buffer, "action")) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}}else if (strstr(action_buffer, "clamping") ) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action // --- 解析: 舵机 ("servo") ---
strcpy_P(keyword_buffer, KEY_SERVO);
if (strstr(json_str, keyword_buffer)) {
is_servo_acting = true;
char* servo_p = strstr(json_str, keyword_buffer);
servo_p += strlen_P(KEY_SERVO);
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
int count = 1;
strcpy_P(keyword_buffer, KEY_SERVO_COUNT);
char* count_p = strstr(json_str, keyword_buffer);
if (count_p) {
count_p += strlen_P(KEY_SERVO_COUNT);
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 95;
const int SERVO_CLAMP_ANGLE = 105;
strcpy_P(keyword_buffer, SERVO_ACTION_OPEN);
bool isOpen = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_LAY_DOWN);
bool isLayDown = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLOSE);
bool isClose = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_ACTION);
bool isAction = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLAMPING);
bool isClamping = strcmp(action_buffer, keyword_buffer) == 0;
if (isOpen || isLayDown) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (isClose) {
myservo.write(SERVO_CLOSE_ANGLE);
} else if (isAction) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}
} else if (isClamping) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action_Finish();
is_servo_acting = false;
return;
}
}
}_Finish();
is_servo_acting = false;
return;
}
}- 解析RGB灯颜色切换,当解析到与RGB灯光有关指令时,调用
ultrasound.Color()函数控制左右灯光颜色变化。
// --- 解析: RGB灯 ("lr") ---
strcpy_P(keyword_buffer, KEY_RGB_LR);
if (strstr(json_str, keyword_buffer)) {
uint8_t lr = 0, lg = 0, lb = 0;
uint8_t rr = 0, rg = 0, rb = 0;
char* p;
if ((p = strstr(json_str, "\"lr\":"))) lr = atoi(p + 5);
if ((p = strstr(json_str, "\"lg\":"))) lg = atoi(p + 5);
if ((p = strstr(json_str, "\"lb\":"))) lb = atoi(p + 5);
if ((p = strstr(json_str, "\"rr\":"))) rr = atoi(p + 5);
if ((p = strstr(json_str, "\"rg\":"))) rg = atoi(p + 5);
if ((p = strstr(json_str, "\"rb\":"))) rb = atoi(p + 5);
ultrasound.Color(rr, rg, rb,lr, lg, lb);
WonderLLM_Send_Action_Finish();
return;
}- 解析模式切换
解析智能避障模式并解析避障距离distance。
// --- 切换模式的逻辑 ---
if (strstr(action_buffer, "avoid")) {
avoid_flag = 1;
line_patrol_flag = 0;
normal_flag = 0;
strcpy_P(keyword_buffer, KEY_MODE_DISTANCE);
char* distance_p = strstr(json_str, keyword_buffer);
if (distance_p) {
distance_p += strlen_P(KEY_MODE_DISTANCE);
avoid_distance = atoi(distance_p) * 10;
}解析智能巡线模式,并解析超声波模块避障距离distance。
} else if (strstr(action_buffer, "line_patrol")) {
avoid_flag = 0;
line_patrol_flag = 1;
normal_flag = 0;
strcpy_P(keyword_buffer, KEY_MODE_DISTANCE);
char* distance_p = strstr(json_str, keyword_buffer);
if (distance_p) {
distance_p += strlen_P(KEY_MODE_DISTANCE);
avoid_distance = atoi(distance_p) * 10;
}解析普通模式。
} else if (strstr(action_buffer, "normal")) {
avoid_flag = 0;
line_patrol_flag = 0;
normal_flag = 1;
ultrasound.Color(0, 0, 225, 0, 0, 225);
}- 解析视觉指令
strcpy_P(keyword_buffer, KEY_VISION);
if (strstr(json_str, keyword_buffer)) {
char* vision_p = strstr(json_str, keyword_buffer);
if (vision_p != NULL) {
vision_p += strlen_P(KEY_VISION);
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0}; // 增加缓冲区大小
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}在进行智能巡线时,当检测到白线,会打开摄像头识别转向路标,发出转向命令,并调用startMoveCar函数控制机器人进行转向运动。
// --- 解析: 方向指令 (vision) ---
else if (strstr(json_str, "\"vision\":\"")) {
char* vision_p = strstr(json_str, "\"vision\":\"");
if (vision_p != NULL) {
// 1. 解析方向字符串
vision_p += 10; // 跳过 "vision":"
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}
// 2. 根据方向执行动作,识别方向与机器人方向相反
if (strcmp(direction_buffer, "left") == 0) {
//向右转
startMoveCar("right", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
} else if (strcmp(direction_buffer, "right") == 0) {
// 向左转
startMoveCar("left", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
}
WonderLLM_Send_Action_Finish();
return;
}
}
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.cpp”
- WonderLLM通信流程
1.工具注册JSON数据
注册了蜂鸣器控制工具,小车移动控制工具,RGB灯控制工具,小车运行模式切换工具,超声波距离获取,机械爪控制工具,系统配置命令工具。这些字符串都被加入到一个 string_table 表中,供注册函数批量发送。
// --- PROGMEM 数据 ---
const char set_buzzer[] PROGMEM =
"{\"tool_name\":\"self.car.set_buzzer\","
"\"command\":\"控制小车的蜂鸣器时调用这个工具。buzzer是蜂鸣器响的次数。\","
"\"params\":[[\"buzzer\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char move[] PROGMEM =
"{\"tool_name\":\"self.car.move\","
"\"command\":\"控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括:'forward', 'backward','turn_left','turn_right','pan_right','pan_right',time为移动时间,单位是秒,速度是0.25米每秒,旋转的速度是90度每秒。\","
"\"params\":[[\"move\",\"string\"],[\"time\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_rgb[] PROGMEM =
"{\"tool_name\":\"self.car.set_rgb\","
"\"command\":\"设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255。\","
"\"params\":[[\"lr\",\"int\",0,255],[\"lg\",\"int\",0,255],[\"lb\",\"int\",0,255],"
"[\"rr\",\"int\",0,255],[\"rg\",\"int\",0,255],[\"rb\",\"int\",0,255]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_mode[] PROGMEM =
"{\"tool_name\":\"self.car.set_mode\","
"\"command\":\"切换小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。\","
"\"params\":[[\"mode\",\"string\"],[\"distance\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char get_status[] PROGMEM =
"{\"tool_name\":\"self.car.get_status\","
"\"command\":\"获取超声波的距离时调用这个工具。 'distance'单位为厘米\","
"\"params\":[[\"status_name\",\"string\"]],"
"\"block\":\"true\","
"\"return\":\"true\"}";
const char servo[] PROGMEM =
"{\"tool_name\":\"self.car.servo\","
"\"command\":\"控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。\","
"\"params\":[[\"servo\",\"string\"],[\"count\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char *const string_table[] PROGMEM = {set_buzzer, move, set_rgb, set_mode, get_status, servo};2.初始化函数WonderLLM_Init()
设置IIC频率为400kHz。检测从设备,如果有响应则开始注册工具;如果没有响应,则打印“WonderLLM device not found”。
bool WonderLLM_Init(void) {
Wire.begin();
Wire.setClock(400000);
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
if (Wire.endTransmission() != 0) {
Serial.println(F("WonderLLM device not found."));
return false;
}
Serial.println(F("WonderLLM device found. Registering tools..."));
delay(100);
if (!register_tools()) {
Serial.println(F("Failed to register tools."));
return false;
}
WonderLLM_MCP_Finish();
return true;
}3.发送控制命令
Arduino主控通过 I2C 将 JSON 命令打包发送,WonderLLM从机解析 JSON 命令,随后miniAuto执行相应动作(移动/亮灯/抓取等)。
void WonderLLM_Send_Action_Finish(void) {
char json_str[44];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}
void WonderLLM_Send_Status(const char* params_str) {
char json_str[56];
snprintf(json_str, sizeof(json_str), "{\"command\":\"status\",\"params\":[%s]}", params_str);
send_frame_ram(json_str);
}
static bool send_frame_ram(const char* ram_str) {
const size_t WIRE_BUFFER_SIZE = 32;
size_t total_len = strlen(ram_str);
if (total_len == 0) return true;
for (size_t offset = 0; offset < total_len; offset += WIRE_BUFFER_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > WIRE_BUFFER_SIZE) chunk_size = WIRE_BUFFER_SIZE;
Wire.write((const uint8_t*)ram_str + offset, chunk_size);
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) return false;
}
return true;
}
static bool send_frame_progmem(const char* progmem_str) {
size_t total_len = strlen_P(progmem_str);
if (total_len == 0) return true;
Serial.print(F("-> Sending:"));
char temp_buffer[total_len + 1];
strcpy_P(temp_buffer, progmem_str);
Serial.println(temp_buffer);
for (size_t offset = 0; offset < total_len; offset += MAX_FRAME_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > MAX_FRAME_SIZE) chunk_size = MAX_FRAME_SIZE;
const char* chunk_ptr = progmem_str + offset;
for (size_t i = 0; i < chunk_size; i++) {
Wire.write(pgm_read_byte(chunk_ptr + i));
}
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) {
Serial.println(F("I2C PROGMEM transmission error"));
return false;
}
}
return true;
}4.接收反馈
WonderLLM 执行完命令后,会通过 I²C 回发一帧数据。
bool receive_frame(char* buffer, uint16_t buffer_size, uint16_t* received_len) {
uint16_t data_len = 0;
uint16_t part_ID = 0;
uint16_t part_num = 0;
uint16_t total_received_len = 0;
// 初始化输出长度
*received_len = 0;
// 1. 接收第一个分片的头部
if (!receive_frame_head(&part_ID, &part_num, &data_len)) {
return false;
}
// 2. 检查是否是第一个分片,如果不是,则说明丢包,放弃本次接收
if (part_ID != 1) {
return false;
}
// 3. 循环接收所有分片
for (int i = 1; i <= part_num; i++) {
// 检查缓冲区是否足够容纳下一个分片
if (total_received_len + data_len > buffer_size) {
// 缓冲区空间不足,这是一个严重错误
return false;
}
// STM32代码中的延迟,这里保留
delay(10);
// 4. 请求当前分片的数据和1字节的校验和
uint8_t bytes_to_read = data_len + 1;
if (Wire.requestFrom(WonderLLM_SLAVE_ADDRESS, (int)bytes_to_read) != bytes_to_read) {
// 没收到期望长度的数据
return false;
}
// 5. 读取数据到缓冲区
// 注意:我们将数据直接读到缓冲区的正确位置 (total_received_len)
char* current_buffer_pos = buffer + total_received_len;
for (uint16_t j = 0; j < data_len; j++) {
current_buffer_pos[j] = Wire.read();
}
uint8_t received_checksum = Wire.read();
// 6. 校验数据
if (calculate_checksum((uint8_t*)current_buffer_pos, data_len) == received_checksum) {
// 校验成功,更新已接收的总长度
total_received_len += data_len;
} else {
// 校验失败,清空已接收的数据并退出
memset(buffer, 0, total_received_len);
*received_len = 0;
return false;
}
// 7. 如果不是最后一个分片,准备接收下一个分片的头部
if (i < part_num) {
delay(100);
uint16_t next_part_ID = 0;
uint16_t next_part_num = 0;
uint16_t next_data_len = 0;
if (!receive_frame_head(&next_part_ID, &next_part_num, &next_data_len)) {
// 接收下一个头部失败
return false;
}
// 8. 验证下一个分片的头部信息
// a) 分片ID是否连续? b) 总分片数是否保持一致?
if ((part_ID + 1 != next_part_ID) || (part_num != next_part_num)) {
// 分片不连续或总数不一致,说明丢包或数据错乱
return false;
}
// 更新当前分片ID和下一个分片的数据长度,为下一次循环做准备
part_ID = next_part_ID;
data_len = next_data_len;
}
}
// 所有分片成功接收并校验
*received_len = total_received_len;
return true;
}5.执行或视觉反馈
(1) 视觉命令
Arduino 向WonderLLM发送视觉请求 vision_request,WonderLLM返回 {"result":"left"} 或 {"result":"right"} 或 {"result":"none"}。
const char vision_request[] PROGMEM =
"{\"tool_name\":\"mcu.request\",\"command\":\"vision\",\"params\":\"判断画面中路标的方向,你的返回只能是left、right或者none,不要任何解释和说明\"}";
void WonderLLM_Request_Vision(void) {
send_frame_progmem(vision_request);
}(2) 动作命令
Arduino 发送 , WonderLLM 返回 {"status":"ok"} 或 action_finish 信号。
void WonderLLM_Send_Action_Finish(void) {
char json_str[64];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 语音控制蜂鸣器鸣响
首先检查是否处于蜂鸣器鸣响模式如果没有则直接。如果当前蜂鸣器正在响,那么此时应关闭蜂鸣;如果当前没有响,则开始发声。每响一次鸣响次数递减,次数归零后结束任务。
void updateBeep() {
if (!is_beeping) return;
if (millis() >= beep_next_change_time) {
if (beep_state_is_on) { // 当前在响,需要停止
noTone(buzzerPin);
beep_state_is_on = false;
if (beep_times_left > 0) {
beep_next_change_time = millis() + 100; // 停顿100ms
} else {
is_beeping = false; // 全部响完
}
} else { // 当前没响,需要开始响
tone(buzzerPin, 1500);
beep_state_is_on = true;
beep_times_left--;
beep_next_change_time = millis() + 100; // 响100ms
}
}
}- 语音控制超声波颜色变化
以下分析的程序路径为:“02 程序文件/WonderLLM/Ultrasound.cpp”.
超声波传感器通过IIC协议进行通信,设置RGB左右两个灯的颜色,支持左右RGB灯独立的颜色控制。
r1, g1, b1 为第一个RGB灯的颜色分量(0-255),r2, g2, b2 为 第二个RGB灯的颜色分量(0-255)。
//设置超声波rgb灯的颜色
//r1,g1,b1表示右边rgb灯的三原色的比例,范围0-255
//r2,g2,b2表示左边rgb灯的三原色的比例,范围0-255
void Ultrasound::Color(uint8_t r1, uint8_t g1, uint8_t b1, uint8_t r2, uint8_t g2, uint8_t b2)
{
uint8_t RGB[6];
uint8_t value = RGB_WORK_SIMPLE_MODE;
wireWriteDataArray(ULTRASOUND_I2C_ADDR, RGB_WORK_MODE,&value,1);
RGB[0] = r1;RGB[1] = g1;RGB[2] = b1;//RGB1
RGB[3] = r2;RGB[4] = g2;RGB[5] = b2;//RGB2
wireWriteDataArray(ULTRASOUND_I2C_ADDR, RGB1_R,RGB,6);
}- 语音控制小车移动
- 控制小车移动
根据给定的方向、持续时间和速度启动小车移动,并可以设置移动结束后的下一个动作。
根据 direction 字符串的不同值,设置小车的核心运动参数,car_derection为方向角度,speed_data为直线运动速度,car_rot为旋转速度。
运动结束后,根据 next_action_on_move_finish 执行预设的后续动作。
void startMoveCar(String direction, unsigned long duration_ms, uint8_t speed, NextAction next_action = NEXT_ACTION_NONE) {
// 如果当前正在移动,则忽略新的移动指令,防止冲突
if (is_moving) {
return;
}
next_action_on_move_finish = NEXT_ACTION_NONE ;
if (direction == "forward") {
car_derection = 0;
speed_data = speed;
car_rot = 0;
} else if (direction == "backward") {
car_derection = 180;
speed_data = speed;
car_rot = 0;
} else if (direction == "turn_left") {
car_derection = 0;
speed_data = 0;
car_rot = speed;
} else if (direction == "turn_right") {
car_derection = 0;
speed_data = 0;
car_rot = -speed;
} else if (direction == "pan_left") {
car_derection = 90;
speed_data = 2*speed;
car_rot = 0;
} else if (direction == "pan_right") {
car_derection = 270;
speed_data = 2*speed;
car_rot = 0;
} else if (direction == "right") {
car_derection = 0;
speed_data = speed;
car_rot = -speed;
} else if (direction == "left") {
car_derection = 0;
speed_data = speed;
car_rot = speed;
}else {
// 未知方向,什么也不做
return;
}
// 设置状态变量以启动移动
is_moving = true;
move_start_time = millis();
move_duration_ms = duration_ms;
next_action_on_move_finish = next_action;
}- 更新运动状态
通过周期性检查运动时间,确保小车在指定时长后准确停止,并根据预设逻辑衔接下一个动作(如启动巡线)。
void updateCarMove() {
// 如果没有在执行移动指令,则直接返回
if (!is_moving) {
return;
}
// 检查移动时间是否已经达到或超过了设定的时长
if (millis() - move_start_time >= move_duration_ms) {
// 时间到,停止小车
car_derection = 0;
speed_data = 0;
car_rot = 0;
// 恢复到空闲状态
is_moving = false;
if (next_action_on_move_finish == NEXT_ACTION_START_LINE_PATROL) {
line_patrol_flag = 1; // 设置巡线标志
}
next_action_on_move_finish = NEXT_ACTION_NONE;
}
}8.4 智能避障
8.4.1 项目介绍
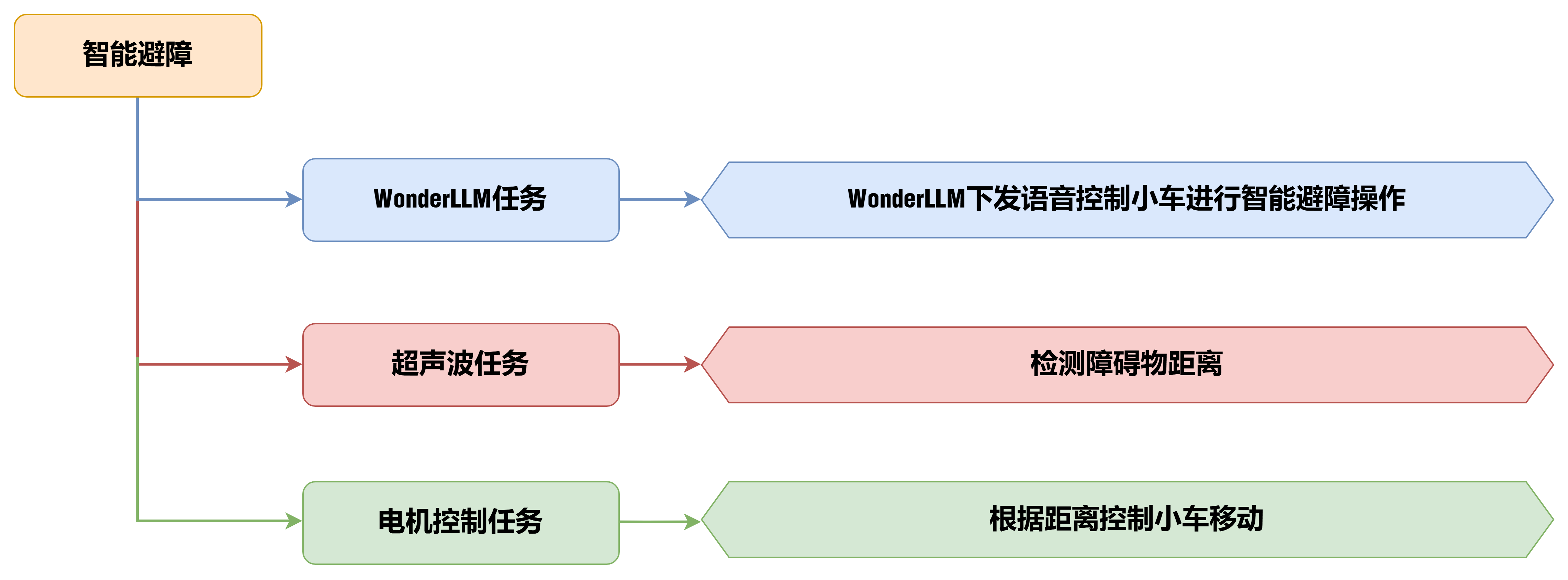
本节通过发光超声波模块检测障碍物距离,操控小车前进或者右转进行避障。
8.4.2 实现流程图
8.4.3 程序下载
NOTE
- 下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
- 接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开“02 程序文件\WonderLLM\WonderLLM.ino”。
将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击左侧的库管理,导入PID库文件(如果已安装,可跳过此步骤)。
点击
,将程序下载至Arduino中,等待下载完成即可。
8.4.4 实现效果
当对WonderLLM说出“开启智能避障模式,并设置避障距离为30”(用户可以自行设置避障距离)相关指令时,小车会根据超声波所测障碍物的距离,控制小车进行转向。
当前方距离小于所设置的避障距离时,小车原地右转;当前方距离大于所设置的避障距离 时,小车恢复直行。
8.4.5 程序分析
以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 导入库文件
导入玩法所需的舵机控制库,IIC通信库,超声波模块控制库,以及WonderLLM模块的通讯库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include <Wire.h>
#include "Ultrasound.h"
#include "WonderLLM.h"- 定义全局变量及引脚
- 分别定义了状态标志变量,运动控制变量,时间控制变量,电压检测变量。
typedef enum {
NEXT_ACTION_NONE,
NEXT_ACTION_START_LINE_PATROL
} NextAction;
static NextAction next_action_on_move_finish = NEXT_ACTION_NONE;
bool is_moving = false; // 标志位,表示当前是否正在执行移动指令
unsigned long move_start_time = 0; // 移动开始的时间戳 (millis)
unsigned long move_duration_ms = 0; // 需要移动的总时长 (毫秒)
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t line_patrol_flag = 0;/* 巡线模式开关标志位 */
static uint8_t normal_flag = 0; /* 正常模式开关标志位 */
static uint8_t move_flag = 0; /* 移动标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static unsigned long last_poll_millis = 0;
#define POLL_INTERVAL_MS 100
#define RX_BUFFER_SIZE 128
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */
static CRGB rgbs[1];
uint8_t data;
uint8_t rec_data[4];- 分别定义了LED指示灯引脚,蜂鸣器控制引脚,舵机控制引脚以及电机速度和方向的控制引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 非阻塞控制状态机
包括蜂鸣器状态控制以及舵机状态控制。
// 非阻塞蜂鸣器状态
bool is_beeping = false;
int beep_times_left = 0;
unsigned long beep_next_change_time = 0;
bool beep_state_is_on = false; // 当前是否在发声
// 非阻塞舵机状态
bool is_servo_acting = false;
int servo_actions_left = 0;
unsigned long servo_next_change_time = 0;
bool servo_state_is_open = false; // 当前是否是张开状态- 硬件初始化
对串口,RGB灯,舵机,电机,蜂鸣器,WonderLLM模块进行初始化。
void setup() {
Serial.begin(115200);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
delay(2000); /* 等待WonderLLM开机*/
WonderLLM_Init();
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);
}- 主循环loop()
在主循环中不断轮询和处理来自WonderLLM的指令。
void loop() {
// 在主循环中不断轮询和处理来自WonderLLM的指令
WonderLLM_Poll_And_Process();
updateCarMove();
Aovid();
Tracking_Line_Task();
if ( !is_servo_acting) {
Velocity_Controller(car_derection, speed_data, car_rot);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转)。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值。
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 };
// 修复了循环变量未初始化的bug
for(uint8_t i = 0; i < 4; ++i)
{
if(motors[i] < 0) {
direction[i] = !direction[i];
}
digitalWrite(motordirectionPin[i], direction[i]);
// 调用新的多通道软件PWM函数
PWM_Out_MultiChannel(i, motorpwmPin[i], abs(motors[i]));
}
}- 循环接收指令
每隔一段时间才检查一次上位机是否有新指令。
void WonderLLM_Poll_And_Process(void) {
if (millis() - last_poll_millis < POLL_INTERVAL_MS) {
return;
}
last_poll_millis = millis();定义接收缓冲区,用于存放接收到的 JSON 数据。
char rx_buffer[RX_BUFFER_SIZE];
uint16_t received_len = 0;通过 IIC 接口调用 receive_frame(), 从WonderLLM模块读取数据帧。
if (receive_frame(rx_buffer, RX_BUFFER_SIZE, &received_len)) {确保接收数据是有效的字符串(结尾加 \0),并调用 parse_command_manual() 解析 JSON 命令并执行动作。
if (received_len > 1) {
rx_buffer[received_len] = '\0'; // 确保是有效的C字符串
parse_command_manual(rx_buffer);
}
}- 手动解析JSON指令
用户对WonderLLM模块说出语音指令,WonderLLM模块转换为JSON。
解析智能避障模式并解析避障距离distance。
// --- 切换模式的逻辑 ---
if (strstr(action_buffer, "avoid")) {
avoid_flag = 1;
line_patrol_flag = 0;
normal_flag = 0;
// 解析可选的 distance 参数
char* distance_p = strstr(json_str, "\"distance\":");
if (distance_p) {
distance_p += 11; // 正确的偏移量 (跳过 "distance":)
uint16_t new_distance = atoi(distance_p);
avoid_distance = new_distance*10;
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.cpp”
- WonderLLM通信流程
1.工具注册JSON数据
注册了蜂鸣器控制工具,小车移动控制工具,RGB灯控制工具,小车运行模式切换工具,超声波距离获取,机械爪控制工具,系统配置命令工具。这些字符串都被加入到一个 string_table 表中,供注册函数批量发送。
// --- PROGMEM 数据 ---
const char set_buzzer[] PROGMEM =
"{\"tool_name\":\"self.car.set_buzzer\","
"\"command\":\"控制小车的蜂鸣器时调用这个工具。buzzer是蜂鸣器响的次数。\","
"\"params\":[[\"buzzer\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char move[] PROGMEM =
"{\"tool_name\":\"self.car.move\","
"\"command\":\"控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括:'forward', 'backward','turn_left','turn_right','pan_right','pan_right',time为移动时间,单位是秒,速度是0.25米每秒,旋转的速度是90度每秒。\","
"\"params\":[[\"move\",\"string\"],[\"time\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_rgb[] PROGMEM =
"{\"tool_name\":\"self.car.set_rgb\","
"\"command\":\"设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255。\","
"\"params\":[[\"lr\",\"int\",0,255],[\"lg\",\"int\",0,255],[\"lb\",\"int\",0,255],"
"[\"rr\",\"int\",0,255],[\"rg\",\"int\",0,255],[\"rb\",\"int\",0,255]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_mode[] PROGMEM =
"{\"tool_name\":\"self.car.set_mode\","
"\"command\":\"切换小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。\","
"\"params\":[[\"mode\",\"string\"],[\"distance\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char get_status[] PROGMEM =
"{\"tool_name\":\"self.car.get_status\","
"\"command\":\"获取超声波的距离时调用这个工具。 'distance'单位为厘米\","
"\"params\":[[\"status_name\",\"string\"]],"
"\"block\":\"true\","
"\"return\":\"true\"}";
const char servo[] PROGMEM =
"{\"tool_name\":\"self.car.servo\","
"\"command\":\"控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。\","
"\"params\":[[\"servo\",\"string\"],[\"count\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char *const string_table[] PROGMEM = {set_buzzer, move, set_rgb, set_mode, get_status, servo};2.初始化函数WonderLLM_Init()
设置IIC频率为400kHz。检测从设备,如果有响应则开始注册工具;如果没有响应,则打印“WonderLLM device not found”。
bool WonderLLM_Init(void) {
Wire.begin();
Wire.setClock(400000);
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
if (Wire.endTransmission() != 0) {
Serial.println(F("WonderLLM device not found."));
return false;
}
Serial.println(F("WonderLLM device found. Registering tools..."));
delay(100);
if (!register_tools()) {
Serial.println(F("Failed to register tools."));
return false;
}
WonderLLM_MCP_Finish();
return true;
}3.发送控制命令
Arduino主控通过 I2C 将 JSON 命令打包发送,WonderLLM 从机解析 JSON 命令,随后miniAuto执行相应动作(移动/亮灯/抓取等)。
void WonderLLM_Send_Action_Finish(void) {
char json_str[44];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}
void WonderLLM_Send_Status(const char* params_str) {
char json_str[56];
snprintf(json_str, sizeof(json_str), "{\"command\":\"status\",\"params\":[%s]}", params_str);
send_frame_ram(json_str);
}
static bool send_frame_ram(const char* ram_str) {
const size_t WIRE_BUFFER_SIZE = 32;
size_t total_len = strlen(ram_str);
if (total_len == 0) return true;
for (size_t offset = 0; offset < total_len; offset += WIRE_BUFFER_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > WIRE_BUFFER_SIZE) chunk_size = WIRE_BUFFER_SIZE;
Wire.write((const uint8_t*)ram_str + offset, chunk_size);
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) return false;
}
return true;
}
static bool send_frame_progmem(const char* progmem_str) {
size_t total_len = strlen_P(progmem_str);
if (total_len == 0) return true;
Serial.print(F("-> Sending:"));
char temp_buffer[total_len + 1];
strcpy_P(temp_buffer, progmem_str);
Serial.println(temp_buffer);
for (size_t offset = 0; offset < total_len; offset += MAX_FRAME_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > MAX_FRAME_SIZE) chunk_size = MAX_FRAME_SIZE;
const char* chunk_ptr = progmem_str + offset;
for (size_t i = 0; i < chunk_size; i++) {
Wire.write(pgm_read_byte(chunk_ptr + i));
}
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) {
Serial.println(F("I2C PROGMEM transmission error"));
return false;
}
}
return true;
}4.接收反馈
WonderLLM 执行完命令后,会通过 I²C 回发一帧数据。
bool receive_frame(char* buffer, uint16_t buffer_size, uint16_t* received_len) {
uint16_t data_len = 0;
uint16_t part_ID = 0;
uint16_t part_num = 0;
uint16_t total_received_len = 0;
// 初始化输出长度
*received_len = 0;
// 1. 接收第一个分片的头部
if (!receive_frame_head(&part_ID, &part_num, &data_len)) {
return false;
}
// 2. 检查是否是第一个分片,如果不是,则说明丢包,放弃本次接收
if (part_ID != 1) {
return false;
}
// 3. 循环接收所有分片
for (int i = 1; i <= part_num; i++) {
// 检查缓冲区是否足够容纳下一个分片
if (total_received_len + data_len > buffer_size) {
// 缓冲区空间不足,这是一个严重错误
return false;
}
// STM32代码中的延迟,这里保留
delay(10);
// 4. 请求当前分片的数据和1字节的校验和
uint8_t bytes_to_read = data_len + 1;
if (Wire.requestFrom(WonderLLM_SLAVE_ADDRESS, (int)bytes_to_read) != bytes_to_read) {
// 没收到期望长度的数据
return false;
}
// 5. 读取数据到缓冲区
// 注意:我们将数据直接读到缓冲区的正确位置 (total_received_len)
char* current_buffer_pos = buffer + total_received_len;
for (uint16_t j = 0; j < data_len; j++) {
current_buffer_pos[j] = Wire.read();
}
uint8_t received_checksum = Wire.read();
// 6. 校验数据
if (calculate_checksum((uint8_t*)current_buffer_pos, data_len) == received_checksum) {
// 校验成功,更新已接收的总长度
total_received_len += data_len;
} else {
// 校验失败,清空已接收的数据并退出
memset(buffer, 0, total_received_len);
*received_len = 0;
return false;
}
// 7. 如果不是最后一个分片,准备接收下一个分片的头部
if (i < part_num) {
delay(100);
uint16_t next_part_ID = 0;
uint16_t next_part_num = 0;
uint16_t next_data_len = 0;
if (!receive_frame_head(&next_part_ID, &next_part_num, &next_data_len)) {
// 接收下一个头部失败
return false;
}
// 8. 验证下一个分片的头部信息
// a) 分片ID是否连续? b) 总分片数是否保持一致?
if ((part_ID + 1 != next_part_ID) || (part_num != next_part_num)) {
// 分片不连续或总数不一致,说明丢包或数据错乱
return false;
}
// 更新当前分片ID和下一个分片的数据长度,为下一次循环做准备
part_ID = next_part_ID;
data_len = next_data_len;
}
}
// 所有分片成功接收并校验
*received_len = total_received_len;
return true;
}5.执行或视觉反馈
(1) 视觉命令
Arduino 向WonderLLM发送视觉请求 vision_request,WonderLLM返回 {"result":"left"} 或 {"result":"right"} 或 {"result":"none"}。
const char vision_request[] PROGMEM =
"{\"tool_name\":\"mcu.request\",\"command\":\"vision\",\"params\":\"判断画面中路标的方向,你的返回只能是left、right或者none,不要任何解释和说明\"}";
void WonderLLM_Request_Vision(void) {
send_frame_progmem(vision_request);
}(2) 动作命令
Arduino 发送 , WonderLLM 返回 {"status":"ok"} 或 action_finish 信号。
void WonderLLM_Send_Action_Finish(void) {
char json_str[64];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 避障模式
通过超声波模块获取障碍物的距离
/* 避障模式 */
void Aovid(void)
{
distance = ultrasound.Filter();如果超声波模块检测到的距离小于设置的避障距离时,小车以30的速度逆时针自转,超声波左右灯光颜色亮红色。
if(distance < avoid_distance)
{
car_derection = 0;
car_rot = 30;
speed_data = 0;
ultrasound.Color(225, 0, 0, 255, 0, 0);
}如果超声波模块检测到的距离大于或等于设置的避障距离时,小车以30的速度前进自转,超声波左右灯光颜色亮绿色。
if(distance >= avoid_distance)
{
car_derection = 0;
car_rot = 0;
speed_data = 30;
ultrasound.Color(0, 255, 0, 0, 255, 0);
}
}当未开启巡线 (line_patrol_flag == 0),未开启避障 (avoid_flag == 0),当前仍在移动 (move_flag == 1)。
则执行停止小车 (speed_data = 0),清除运动标志 (move_flag = 0) 。
else if(line_patrol_flag == 0 && avoid_flag == 0 & move_flag == 1 )
{
car_derection = 0;
car_rot = 0;
speed_data = 0;
move_flag = 0;
}
}8.5 智能巡线
8.5.1 项目介绍
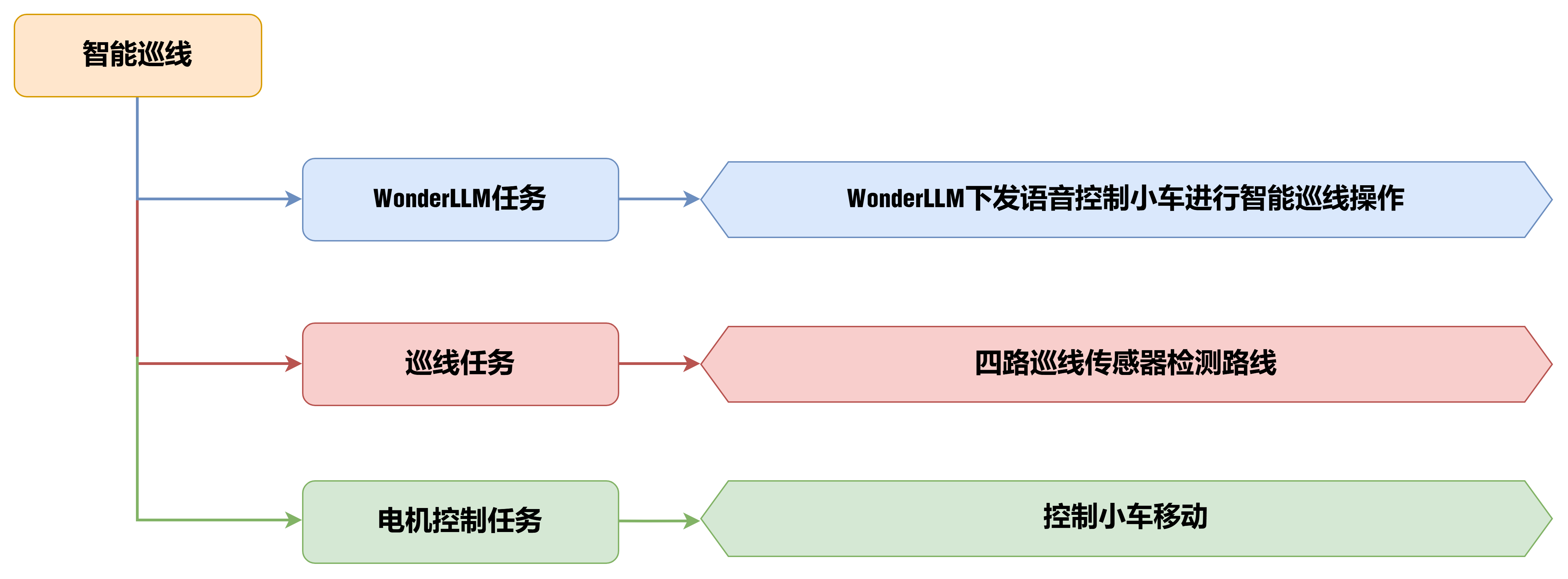
本节通过WonderLLM模块以及四路巡线传感器识别黑色的线路,控制小车跟随线路移动。
8.5.2 实现流程图
8.5.3 程序下载
NOTE
- 下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
- 接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开“02 程序文件\WonderLLM\WonderLLM.ino”程序文件。
将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击左侧的库管理,导入PID库文件(如果已安装,可跳过此步骤)。
点击
,将程序下载至Arduino中,等待下载完成即可。
8.5.4 实现效果
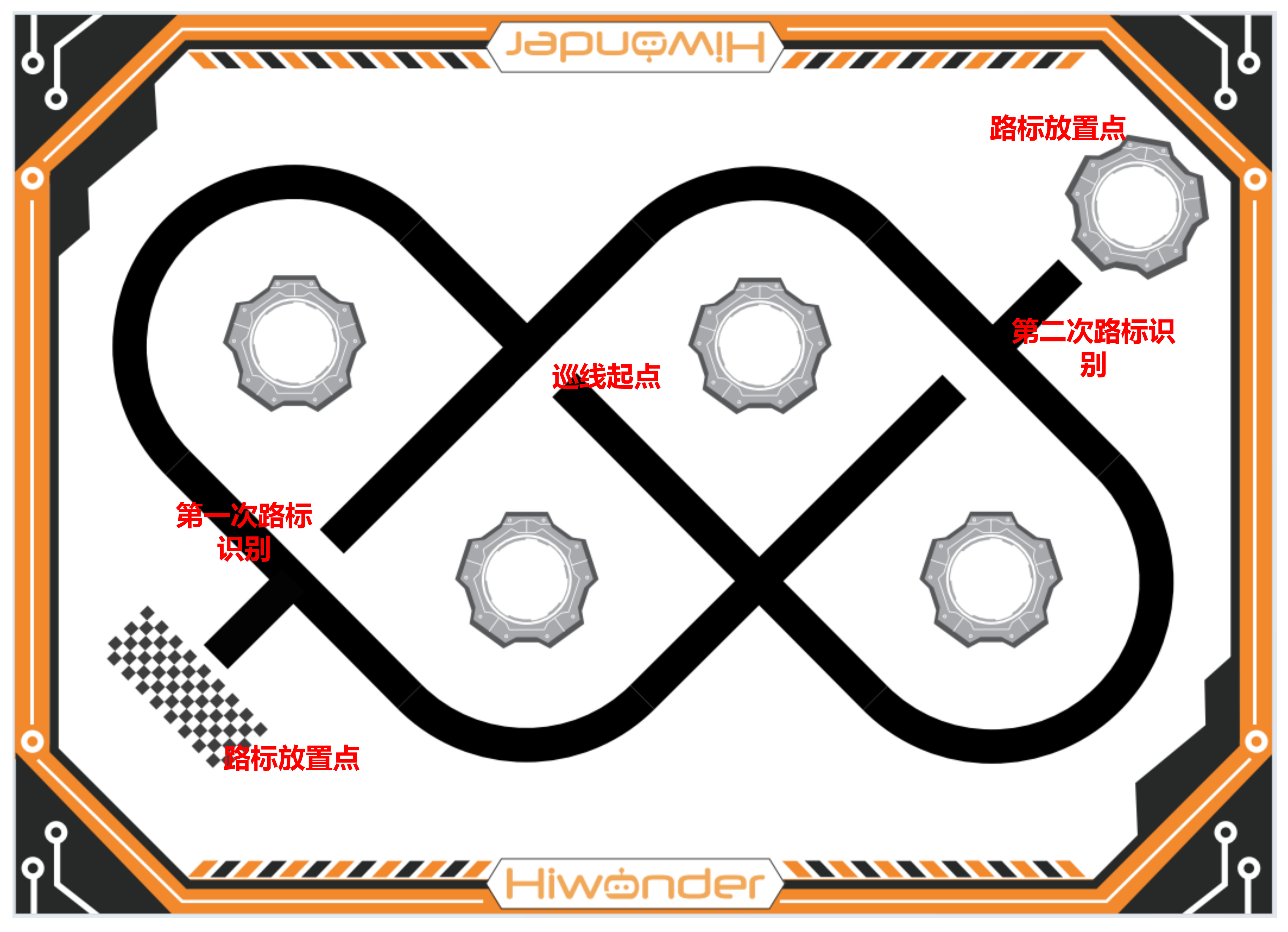
当对WonderLLM说出“开启智能巡线模式,如果遇到障碍物,设置障碍物距离为30”相关指令时,小车会进行智能巡线功能。小车从巡线起点开始巡线,识别到黑线时,会跟随黑线进行移动,若识别到白线则会打开摄像头进行路标识别然后进行转向控制。当遇到障碍物时,小车会停止运动。
NOTE
下图中的地图仅供用户搭建参考,实际不提供。
8.5.5 程序分析
以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 导入库文件
导入玩法所需的舵机控制库,IIC通信库,超声波模块控制库,以及WonderLLM模块的通讯库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include <Wire.h>
#include "Ultrasound.h"
#include "WonderLLM.h"- 定义全局变量及引脚
- 分别定义了状态标志变量,运动控制变量,时间控制变量,电压检测变量。
typedef enum {
NEXT_ACTION_NONE,
NEXT_ACTION_START_LINE_PATROL
} NextAction;
static NextAction next_action_on_move_finish = NEXT_ACTION_NONE;
bool is_moving = false; // 标志位,表示当前是否正在执行移动指令
unsigned long move_start_time = 0; // 移动开始的时间戳 (millis)
unsigned long move_duration_ms = 0; // 需要移动的总时长 (毫秒)
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t line_patrol_flag = 0;/* 巡线模式开关标志位 */
static uint8_t normal_flag = 0; /* 正常模式开关标志位 */
static uint8_t move_flag = 0; /* 移动标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static unsigned long last_poll_millis = 0;
#define POLL_INTERVAL_MS 100
#define RX_BUFFER_SIZE 128
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */- 分别定义了LED指示灯引脚,蜂鸣器控制引脚,舵机控制引脚以及电机速度和方向的控制引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 非阻塞控制状态机
包括蜂鸣器状态控制以及舵机状态控制。
// 非阻塞蜂鸣器状态
bool is_beeping = false;
int beep_times_left = 0;
unsigned long beep_next_change_time = 0;
bool beep_state_is_on = false; // 当前是否在发声
// 非阻塞舵机状态
bool is_servo_acting = false;
int servo_actions_left = 0;
unsigned long servo_next_change_time = 0;
bool servo_state_is_open = false; // 当前是否是张开状态- 硬件初始化
对串口,RGB灯,舵机,电机,WonderLLM模块以及蜂鸣器进行初始化。
void setup() {
Serial.begin(115200);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
delay(2000); /* 等待WonderLLM开机*/
WonderLLM_Init();
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);
}- 主循环loop()
在主循环中不断轮询和处理来自WonderLLM的指令。
void loop() {
// 在主循环中不断轮询和处理来自WonderLLM的指令
WonderLLM_Poll_And_Process();
updateCarMove();
Aovid();
Tracking_Line_Task();
if ( !is_servo_acting) {
Velocity_Controller(car_derection, speed_data, car_rot);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转)。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值。
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 };
// 修复了循环变量未初始化的bug
for(uint8_t i = 0; i < 4; ++i)
{
if(motors[i] < 0) {
direction[i] = !direction[i];
}
digitalWrite(motordirectionPin[i], direction[i]);
// 调用新的多通道软件PWM函数
PWM_Out_MultiChannel(i, motorpwmPin[i], abs(motors[i]));
}
}- 循环接收指令
每隔一段时间才检查一次上位机是否有新指令。
void WonderLLM_Poll_And_Process(void) {
if (millis() - last_poll_millis < POLL_INTERVAL_MS) {
return;
}
last_poll_millis = millis();定义接收缓冲区,用于存放接收到的 JSON 数据。
char rx_buffer[RX_BUFFER_SIZE];
uint16_t received_len = 0;通过 IIC 接口调用 receive_frame(), 从WonderLLM模块读取数据帧。
if (receive_frame(rx_buffer, RX_BUFFER_SIZE, &received_len)) {确保接收数据是有效的字符串(结尾加 \0),并调用 parse_command_manual() 解析 JSON 命令并执行动作。
if (received_len > 1) {
rx_buffer[received_len] = '\0'; // 确保是有效的C字符串
parse_command_manual(rx_buffer);
}
}- 手动解析JSON指令
用户对WonderLLM模块说出语音指令,WonderLLM模块转换为JSON。
解析智能巡线模式,并解析超声波模块避障距离distance。
} else if (strstr(action_buffer, "line_patrol")) {
avoid_flag = 0;
line_patrol_flag = 1;
normal_flag = 0;
strcpy_P(keyword_buffer, KEY_MODE_DISTANCE);
char* distance_p = strstr(json_str, keyword_buffer);
if (distance_p) {
distance_p += strlen_P(KEY_MODE_DISTANCE);
avoid_distance = atoi(distance_p) * 10;
}解析方向指令
在进行智能巡线时,当检测到白线,会打开摄像头识别转向路标,发出转向命令,并调用startMoveCar函数控制机器人进行转向运动。
// --- 解析: 方向指令 (vision) ---
else if (strstr(json_str, "\"vision\":\"")) {
char* vision_p = strstr(json_str, "\"vision\":\"");
if (vision_p != NULL) {
// 1. 解析方向字符串
vision_p += 10; // 跳过 "vision":"
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}
// 2. 根据方向执行动作,识别方向与机器人方向相反
if (strcmp(direction_buffer, "left") == 0) {
//向右转
startMoveCar("right", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
} else if (strcmp(direction_buffer, "right") == 0) {
// 向左转
startMoveCar("left", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
}
WonderLLM_Send_Action_Finish();
return;
}
}
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.cpp”
- WonderLLM通信流程
1.工具注册JSON数据
注册了蜂鸣器控制工具,小车移动控制工具,RGB灯控制工具,小车运行模式切换工具,超声波距离获取,机械爪控制工具,系统配置命令工具。这些字符串都被加入到一个 string_table 表中,供注册函数批量发送。
// --- PROGMEM 数据 ---
const char set_buzzer[] PROGMEM =
"{\"tool_name\":\"self.car.set_buzzer\","
"\"command\":\"控制小车的蜂鸣器时调用这个工具。buzzer是蜂鸣器响的次数。\","
"\"params\":[[\"buzzer\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char move[] PROGMEM =
"{\"tool_name\":\"self.car.move\","
"\"command\":\"控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括:'forward', 'backward','turn_left','turn_right','pan_right','pan_right',time为移动时间,单位是秒,速度是0.25米每秒,旋转的速度是90度每秒。\","
"\"params\":[[\"move\",\"string\"],[\"time\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_rgb[] PROGMEM =
"{\"tool_name\":\"self.car.set_rgb\","
"\"command\":\"设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255。\","
"\"params\":[[\"lr\",\"int\",0,255],[\"lg\",\"int\",0,255],[\"lb\",\"int\",0,255],"
"[\"rr\",\"int\",0,255],[\"rg\",\"int\",0,255],[\"rb\",\"int\",0,255]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_mode[] PROGMEM =
"{\"tool_name\":\"self.car.set_mode\","
"\"command\":\"切换小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。\","
"\"params\":[[\"mode\",\"string\"],[\"distance\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char get_status[] PROGMEM =
"{\"tool_name\":\"self.car.get_status\","
"\"command\":\"获取超声波的距离时调用这个工具。 'distance'单位为厘米\","
"\"params\":[[\"status_name\",\"string\"]],"
"\"block\":\"true\","
"\"return\":\"true\"}";
const char servo[] PROGMEM =
"{\"tool_name\":\"self.car.servo\","
"\"command\":\"控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。\","
"\"params\":[[\"servo\",\"string\"],[\"count\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char *const string_table[] PROGMEM = {set_buzzer, move, set_rgb, set_mode, get_status, servo};2.初始化函数WonderLLM_Init()
设置IIC频率为400kHz。检测从设备,如果有响应则开始注册工具;如果没有响应,则打印“WonderLLM device not found”。
bool WonderLLM_Init(void) {
Wire.begin();
Wire.setClock(400000);
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
if (Wire.endTransmission() != 0) {
Serial.println(F("WonderLLM device not found."));
return false;
}
Serial.println(F("WonderLLM device found. Registering tools..."));
delay(100);
if (!register_tools()) {
Serial.println(F("Failed to register tools."));
return false;
}
WonderLLM_MCP_Finish();
return true;
}3.发送控制命令
Arduino主控通过 I2C 将 JSON 命令打包发送,WonderLLM 从机解析 JSON 命令,随后miniAuto执行相应动作(移动/亮灯/抓取等)。
void WonderLLM_Send_Action_Finish(void) {
char json_str[44];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}
void WonderLLM_Send_Status(const char* params_str) {
char json_str[56];
snprintf(json_str, sizeof(json_str), "{\"command\":\"status\",\"params\":[%s]}", params_str);
send_frame_ram(json_str);
}
static bool send_frame_ram(const char* ram_str) {
const size_t WIRE_BUFFER_SIZE = 32;
size_t total_len = strlen(ram_str);
if (total_len == 0) return true;
for (size_t offset = 0; offset < total_len; offset += WIRE_BUFFER_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > WIRE_BUFFER_SIZE) chunk_size = WIRE_BUFFER_SIZE;
Wire.write((const uint8_t*)ram_str + offset, chunk_size);
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) return false;
}
return true;
}
static bool send_frame_progmem(const char* progmem_str) {
size_t total_len = strlen_P(progmem_str);
if (total_len == 0) return true;
Serial.print(F("-> Sending:"));
char temp_buffer[total_len + 1];
strcpy_P(temp_buffer, progmem_str);
Serial.println(temp_buffer);
for (size_t offset = 0; offset < total_len; offset += MAX_FRAME_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > MAX_FRAME_SIZE) chunk_size = MAX_FRAME_SIZE;
const char* chunk_ptr = progmem_str + offset;
for (size_t i = 0; i < chunk_size; i++) {
Wire.write(pgm_read_byte(chunk_ptr + i));
}
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) {
Serial.println(F("I2C PROGMEM transmission error"));
return false;
}
}
return true;
}4.接收反馈
WonderLLM 执行完命令后,会通过 I²C 回发一帧数据。
bool receive_frame(char* buffer, uint16_t buffer_size, uint16_t* received_len) {
uint16_t data_len = 0;
uint16_t part_ID = 0;
uint16_t part_num = 0;
uint16_t total_received_len = 0;
// 初始化输出长度
*received_len = 0;
// 1. 接收第一个分片的头部
if (!receive_frame_head(&part_ID, &part_num, &data_len)) {
return false;
}
// 2. 检查是否是第一个分片,如果不是,则说明丢包,放弃本次接收
if (part_ID != 1) {
return false;
}
// 3. 循环接收所有分片
for (int i = 1; i <= part_num; i++) {
// 检查缓冲区是否足够容纳下一个分片
if (total_received_len + data_len > buffer_size) {
// 缓冲区空间不足,这是一个严重错误
return false;
}
// STM32代码中的延迟,这里保留
delay(10);
// 4. 请求当前分片的数据和1字节的校验和
uint8_t bytes_to_read = data_len + 1;
if (Wire.requestFrom(WonderLLM_SLAVE_ADDRESS, (int)bytes_to_read) != bytes_to_read) {
// 没收到期望长度的数据
return false;
}
// 5. 读取数据到缓冲区
// 注意:我们将数据直接读到缓冲区的正确位置 (total_received_len)
char* current_buffer_pos = buffer + total_received_len;
for (uint16_t j = 0; j < data_len; j++) {
current_buffer_pos[j] = Wire.read();
}
uint8_t received_checksum = Wire.read();
// 6. 校验数据
if (calculate_checksum((uint8_t*)current_buffer_pos, data_len) == received_checksum) {
// 校验成功,更新已接收的总长度
total_received_len += data_len;
} else {
// 校验失败,清空已接收的数据并退出
memset(buffer, 0, total_received_len);
*received_len = 0;
return false;
}
// 7. 如果不是最后一个分片,准备接收下一个分片的头部
if (i < part_num) {
delay(100);
uint16_t next_part_ID = 0;
uint16_t next_part_num = 0;
uint16_t next_data_len = 0;
if (!receive_frame_head(&next_part_ID, &next_part_num, &next_data_len)) {
// 接收下一个头部失败
return false;
}
// 8. 验证下一个分片的头部信息
// a) 分片ID是否连续? b) 总分片数是否保持一致?
if ((part_ID + 1 != next_part_ID) || (part_num != next_part_num)) {
// 分片不连续或总数不一致,说明丢包或数据错乱
return false;
}
// 更新当前分片ID和下一个分片的数据长度,为下一次循环做准备
part_ID = next_part_ID;
data_len = next_data_len;
}
}
// 所有分片成功接收并校验
*received_len = total_received_len;
return true;
}5.执行或视觉反馈
(1) 视觉命令
Arduino 向WonderLLM发送视觉请求 vision_request,WonderLLM返回 {"result":"left"} 或 {"result":"right"} 或 {"result":"none"}。
const char vision_request[] PROGMEM =
"{\"tool_name\":\"mcu.request\",\"command\":\"vision\",\"params\":\"判断画面中路标的方向,你的返回只能是left、right或者none,不要任何解释和说明\"}";
void WonderLLM_Request_Vision(void) {
send_frame_progmem(vision_request);
}(2) 动作命令
Arduino 发送 , WonderLLM 返回 {"status":"ok"} 或 action_finish 信号。
void WonderLLM_Send_Action_Finish(void) {
char json_str[64];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}- 智能巡线
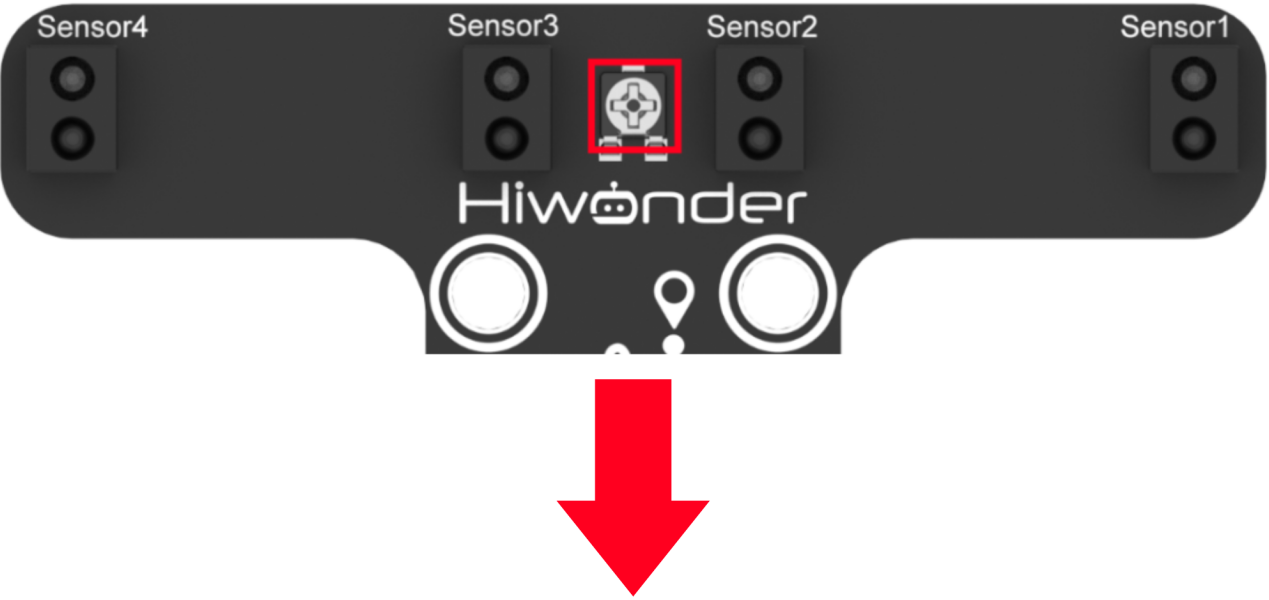
- 获取巡线传感器数据
通过WireReadDataByte()函数向传感器获取当前的路线数据,rec_data数组第0-3位对应的是四路巡线传感器上Sensor1-4探头的值。若获取到的值为0表示未识别到黑线,获取到的值为1则表示识别到黑线,最后将值保存在数组rec_data中。
void Sensor_Receive(void) {
WireReadDataByte(1, data);
rec_data[0] = data & 0x01;
rec_data[1] = (data >> 1) & 0x01;
rec_data[2] = (data >> 2) & 0x01;
rec_data[3] = (data >> 3) & 0x01;
}- 巡线追踪任务
line_patrol_flag:标志位,表示是否进入巡线模式;
move_flag = 1:小车正在移动;
Sensor_Receive():从 I²C 通信模块读取传感器状态。
void Tracking_Line_Task(void) {
if (line_patrol_flag){
move_flag = 1;
Sensor_Receive();Sensor2,Sensor3两个探头检测到黑线时,小车正常直行。
if (rec_data[1] == 1 && rec_data[2] == 1 ) {
car_derection = 0;
car_rot = 80;
speed_data = 50;Sensor2探头检测到黑线时,小车小幅度左转。
}else if (rec_data[1] == 1 ) {
car_derection = 0;
car_rot = 10;
speed_data = 50;Sensor2探头检测到黑线时,小车小幅度右转。
} else if (rec_data[2] == 1) {
car_derection = 0;
car_rot = -10;
speed_data = 50;Sensor1,Sensor2两个探头检测到黑线时,小车左转。
}else if (rec_data[0] == 1 && rec_data[1] == 1 ) {
car_derection = 0;
car_rot = 80;
speed_data = 50;Sensor3,Sensor4两个探头检测到黑线时,小车右转。
}else if (rec_data[2] == 1 && rec_data[3] == 1 ) {
car_derection = 0;
car_rot = -80;
speed_data = 50;Sensor1,Sensor2,Sensor3,Sensor4四个探头均检测到白色时,小车会调用摄像头进行路标识别并进行转向控制。
}else if (rec_data[0] == 0 && rec_data[1] == 0 && rec_data[2] == 0 && rec_data[3] == 0) {
WonderLLM_Request_Vision();
line_patrol_flag = 0;
}
}当小车不是处于巡线或避障模式但小车仍在移动时,则强制小车停止运动,超声波两侧RGB灯亮红色。
else{
car_derection = 0;
car_rot = 0;
speed_data = 0;
move_flag = 0;
ultrasound.Color(225, 0, 0, 255, 0, 0);
}
}8.5.6 功能延伸
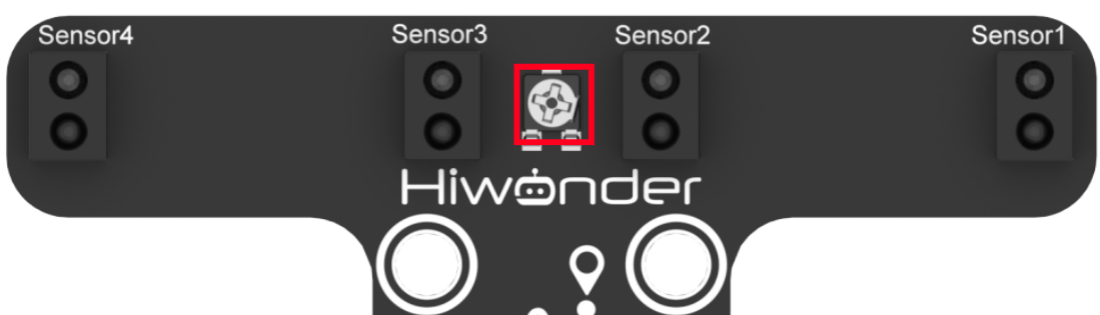
- 如果巡线传感器识别不到黑色线路,那么就需要对巡线传感器的电位器进行调节,巡线传感器上的旋钮顺时针扭动会增加识别的距离,逆时针扭动则会缩短识别的距离。
- 需要将巡线传感器调节至识别到黑线,传感器上的LED灯会熄灭,识别不到黑线会亮起为止。
- 这里我们将旋钮逆时针扭动,缩短识别的距离,调节好之后就可以正常进行巡线了。
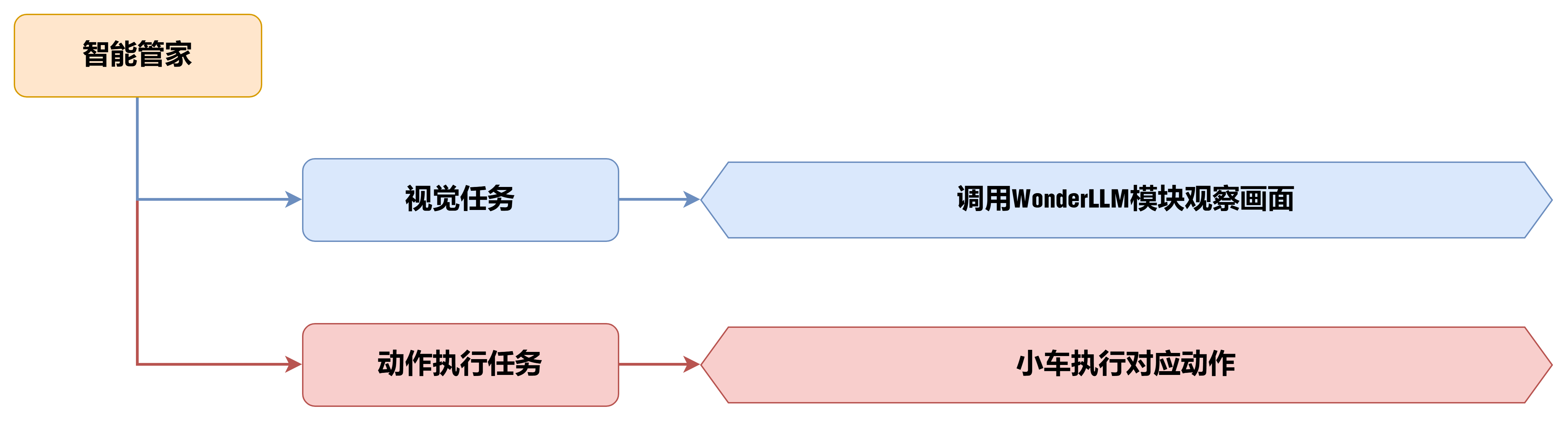
8.6 智能管家
8.6.1 项目介绍
本节通过WonderLLM模块,实现智能管家,可以智能对话。
8.6.2 实现流程图
8.6.3 程序下载
NOTE
- 下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
- 接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开“02 程序文件\WonderLLM\WonderLLM.ino”程序文件。
将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击左侧的库管理,导入PID库文件(如果已安装,可跳过此步骤)。
点击
,将程序下载至Arduino中,等待下载完成即可。
8.6.4 实现效果
当对WonderLLM说出“调用摄像头观察前方有无红色物体,如果有就设置超声波颜色为红色”,WonderLLM会先调用摄像头检测是否有红色物体,如果有,会设置超声波颜色为红色。
8.6.5 程序分析
以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 导入库文件
导入玩法所需的舵机控制库,IIC通信库,超声波模块控制库,以及WonderLLM模块的通讯库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include <Wire.h>
#include "Ultrasound.h"
#include "WonderLLM.h"- 定义全局变量及引脚
- 分别定义了状态标志变量,运动控制变量,时间控制变量,电压检测变量。
typedef enum {
NEXT_ACTION_NONE,
NEXT_ACTION_START_LINE_PATROL
} NextAction;
static NextAction next_action_on_move_finish = NEXT_ACTION_NONE;
bool is_moving = false; // 标志位,表示当前是否正在执行移动指令
unsigned long move_start_time = 0; // 移动开始的时间戳 (millis)
unsigned long move_duration_ms = 0; // 需要移动的总时长 (毫秒)
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t line_patrol_flag = 0;/* 巡线模式开关标志位 */
static uint8_t normal_flag = 0; /* 正常模式开关标志位 */
static uint8_t move_flag = 0; /* 移动标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static unsigned long last_poll_millis = 0;
#define POLL_INTERVAL_MS 100
#define RX_BUFFER_SIZE 128
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */- 分别定义了LED指示灯引脚,蜂鸣器控制引脚,舵机控制引脚以及电机速度和方向的控制引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 非阻塞控制状态机
包括蜂鸣器状态控制以及舵机状态控制。
// 非阻塞蜂鸣器状态
bool is_beeping = false;
int beep_times_left = 0;
unsigned long beep_next_change_time = 0;
bool beep_state_is_on = false; // 当前是否在发声
// 非阻塞舵机状态
bool is_servo_acting = false;
int servo_actions_left = 0;
unsigned long servo_next_change_time = 0;
bool servo_state_is_open = false; // 当前是否是张开状态- 硬件初始化
对串口,RGB灯,舵机,电机,WonderLLM模块以及蜂鸣器进行初始化。
void setup() {
Serial.begin(115200);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
delay(2000); /* 等待WonderLLM开机*/
WonderLLM_Init();
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);
}- 主循环loop()
在主循环中不断轮询和处理来自WonderLLM的指令。
void loop() {
// 在主循环中不断轮询和处理来自WonderLLM的指令
WonderLLM_Poll_And_Process();
updateCarMove();
Aovid();
Tracking_Line_Task();
if ( !is_servo_acting) {
Velocity_Controller(car_derection, speed_data, car_rot);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转)。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值。
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 };
// 修复了循环变量未初始化的bug
for(uint8_t i = 0; i < 4; ++i)
{
if(motors[i] < 0) {
direction[i] = !direction[i];
}
digitalWrite(motordirectionPin[i], direction[i]);
// 调用新的多通道软件PWM函数
PWM_Out_MultiChannel(i, motorpwmPin[i], abs(motors[i]));
}
}- 循环接收指令
每隔一段时间才检查一次上位机是否有新指令。
void WonderLLM_Poll_And_Process(void) {
if (millis() - last_poll_millis < POLL_INTERVAL_MS) {
return;
}
last_poll_millis = millis();定义接收缓冲区,用于存放接收到的 JSON 数据。
char rx_buffer[RX_BUFFER_SIZE];
uint16_t received_len = 0;通过 IIC 接口调用 receive_frame(), 从WonderLLM模块读取数据帧。
if (receive_frame(rx_buffer, RX_BUFFER_SIZE, &received_len)) {确保接收数据是有效的字符串(结尾加 \0),并调用 parse_command_manual() 解析 JSON 命令并执行动作。
if (received_len > 1) {
rx_buffer[received_len] = '\0'; // 确保是有效的C字符串
parse_command_manual(rx_buffer);
}
}- 手动解析JSON指令
用户对WonderLLM模块说出语音指令,WonderLLM模块转换为JSON。
- 查找 buzzer 字段并把后面的数字当作次数
atoi(),调用beep()函数驱动蜂鸣器鸣响。
strcpy_P(keyword_buffer, KEY_BUZZER);
if (strstr(json_str, keyword_buffer)) {
char* p = strstr(json_str, keyword_buffer);
if (p != NULL) {
p += strlen_P(KEY_BUZZER);
int beep_count = atoi(p);
beep(1500, beep_count, 100, 100);
WonderLLM_Send_Action_Finish();
return;
}
}- 解析移动方向字符串move与运行时间time(秒),调用
startMoveCar()函数启动移动。
strcpy_P(keyword_buffer, KEY_MOVE); // 使用字符串字面量更清晰
char time_key_buffer[10];
strcpy_P(time_key_buffer, KEY_TIME);
if (strstr(json_str, keyword_buffer) && strstr(json_str, time_key_buffer)) {
char* move_p = strstr(json_str, keyword_buffer);
char* time_p = strstr(json_str, time_key_buffer);
if (move_p != NULL && time_p != NULL) {
// 解析方向
move_p += strlen(keyword_buffer); // 跳过 "move":"
char* end_quote = strchr(move_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - move_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, move_p, len);
}
}
// 解析时间
time_p += strlen(time_key_buffer); // 跳过 "time":
int move_time_sec = atoi(time_p);
unsigned long move_time_ms = move_time_sec * 1000;
if (strlen(direction_buffer) > 0 && move_time_ms > 0) {
startMoveCar(direction_buffer, move_time_ms, 50);
return;
}
}
}- 解析状态获取指令。
// --- 解析: 获取状态 ("status_name") ---
strcpy_P(keyword_buffer, KEY_STATUS);
if (strstr(json_str, keyword_buffer)) {
char* status_p = strstr(json_str, keyword_buffer);
if (status_p != NULL ) {
status_p += strlen(keyword_buffer) + 1; // 跳过 "status_name":"
char* end_quote = strchr(status_p, '"');
if (end_quote != NULL) {
*end_quote = '\0';
getStatus(status_p);
*end_quote = '"';
return;
}
}
}- 解析舵机动作,调用
myservo.write()函数并通过控制舵机角度来实现机械爪张合以及物品抓取。
// --- 解析: 舵机 (寻找 "servo":) ---
else if (strstr(json_str, "\"servo\":")) {
is_servo_acting = true;
char* servo_p = strstr(json_str, "\"servo\":\"");
if (servo_p != NULL) {
// 解析动作
servo_p += 9; // 跳过 "servo":"
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
}
}
// 解析次数
int count = 1;
char* count_p = strstr(json_str, "\"count\":");
if (count_p) {
count_p += 8; // 跳过 "count":
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 90;
const int SERVO_CLAMP_ANGLE = 100;
if (strstr(action_buffer, "open") || strstr(action_buffer, "lay_down") ) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (strstr(action_buffer, "close")) {
myservo.write(SERVO_CLOSE_ANGLE);
}else if (strstr(action_buffer, "action")) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}}else if (strstr(action_buffer, "clamping") ) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action // --- 解析: 舵机 ("servo") ---
strcpy_P(keyword_buffer, KEY_SERVO);
if (strstr(json_str, keyword_buffer)) {
is_servo_acting = true;
char* servo_p = strstr(json_str, keyword_buffer);
servo_p += strlen_P(KEY_SERVO);
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
int count = 1;
strcpy_P(keyword_buffer, KEY_SERVO_COUNT);
char* count_p = strstr(json_str, keyword_buffer);
if (count_p) {
count_p += strlen_P(KEY_SERVO_COUNT);
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 95;
const int SERVO_CLAMP_ANGLE = 105;
strcpy_P(keyword_buffer, SERVO_ACTION_OPEN);
bool isOpen = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_LAY_DOWN);
bool isLayDown = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLOSE);
bool isClose = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_ACTION);
bool isAction = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLAMPING);
bool isClamping = strcmp(action_buffer, keyword_buffer) == 0;
if (isOpen || isLayDown) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (isClose) {
myservo.write(SERVO_CLOSE_ANGLE);
} else if (isAction) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}
} else if (isClamping) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action_Finish();
is_servo_acting = false;
return;
}
}
}_Finish();
is_servo_acting = false;
return;
}
}- 解析RGB灯颜色切换,当解析到与RGB灯光有关指令时,调用
ultrasound.Color()函数控制左右灯光颜色变化。
// --- 解析: RGB灯 ("lr") ---
strcpy_P(keyword_buffer, KEY_RGB_LR);
if (strstr(json_str, keyword_buffer)) {
uint8_t lr = 0, lg = 0, lb = 0;
uint8_t rr = 0, rg = 0, rb = 0;
char* p;
if ((p = strstr(json_str, "\"lr\":"))) lr = atoi(p + 5);
if ((p = strstr(json_str, "\"lg\":"))) lg = atoi(p + 5);
if ((p = strstr(json_str, "\"lb\":"))) lb = atoi(p + 5);
if ((p = strstr(json_str, "\"rr\":"))) rr = atoi(p + 5);
if ((p = strstr(json_str, "\"rg\":"))) rg = atoi(p + 5);
if ((p = strstr(json_str, "\"rb\":"))) rb = atoi(p + 5);
ultrasound.Color(rr, rg, rb,lr, lg, lb);
WonderLLM_Send_Action_Finish();
return;
}- 解析模式切换
解析智能避障模式并解析避障距离distance。
// --- 切换模式的逻辑 ---
if (strstr(action_buffer, "avoid")) {
avoid_flag = 1;
line_patrol_flag = 0;
normal_flag = 0;
strcpy_P(keyword_buffer, KEY_MODE_DISTANCE);
char* distance_p = strstr(json_str, keyword_buffer);
if (distance_p) {
distance_p += strlen_P(KEY_MODE_DISTANCE);
avoid_distance = atoi(distance_p) * 10;
}解析智能巡线模式,并解析超声波模块避障距离distance。
} else if (strstr(action_buffer, "line_patrol")) {
avoid_flag = 0;
line_patrol_flag = 1;
normal_flag = 0;
strcpy_P(keyword_buffer, KEY_MODE_DISTANCE);
char* distance_p = strstr(json_str, keyword_buffer);
if (distance_p) {
distance_p += strlen_P(KEY_MODE_DISTANCE);
avoid_distance = atoi(distance_p) * 10;
}解析普通模式。
} else if (strstr(action_buffer, "normal")) {
avoid_flag = 0;
line_patrol_flag = 0;
normal_flag = 1;
ultrasound.Color(0, 0, 225, 0, 0, 225);
}- 解析视觉指令
strcpy_P(keyword_buffer, KEY_VISION);
if (strstr(json_str, keyword_buffer)) {
char* vision_p = strstr(json_str, keyword_buffer);
if (vision_p != NULL) {
vision_p += strlen_P(KEY_VISION);
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0}; // 增加缓冲区大小
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}在进行智能巡线时,当检测到白线,会打开摄像头识别转向路标,发出转向命令,并调用startMoveCar函数控制机器人进行转向运动。
// --- 解析: 方向指令 (vision) ---
else if (strstr(json_str, "\"vision\":\"")) {
char* vision_p = strstr(json_str, "\"vision\":\"");
if (vision_p != NULL) {
// 1. 解析方向字符串
vision_p += 10; // 跳过 "vision":"
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}
// 2. 根据方向执行动作,识别方向与机器人方向相反
if (strcmp(direction_buffer, "left") == 0) {
//向右转
startMoveCar("right", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
} else if (strcmp(direction_buffer, "right") == 0) {
// 向左转
startMoveCar("left", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
}
WonderLLM_Send_Action_Finish();
return;
}
}
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.cpp”
- WonderLLM通信流程
1.工具注册JSON数据
注册了蜂鸣器控制工具,小车移动控制工具,RGB灯控制工具,小车运行模式切换工具,超声波距离获取,机械爪控制工具,系统配置命令工具。这些字符串都被加入到一个 string_table 表中,供注册函数批量发送。
// --- PROGMEM 数据 ---
const char set_buzzer[] PROGMEM =
"{\"tool_name\":\"self.car.set_buzzer\","
"\"command\":\"控制小车的蜂鸣器时调用这个工具。buzzer是蜂鸣器响的次数。\","
"\"params\":[[\"buzzer\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char move[] PROGMEM =
"{\"tool_name\":\"self.car.move\","
"\"command\":\"控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括:'forward', 'backward','turn_left','turn_right','pan_right','pan_right',time为移动时间,单位是秒,速度是0.25米每秒,旋转的速度是90度每秒。\","
"\"params\":[[\"move\",\"string\"],[\"time\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_rgb[] PROGMEM =
"{\"tool_name\":\"self.car.set_rgb\","
"\"command\":\"设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255。\","
"\"params\":[[\"lr\",\"int\",0,255],[\"lg\",\"int\",0,255],[\"lb\",\"int\",0,255],"
"[\"rr\",\"int\",0,255],[\"rg\",\"int\",0,255],[\"rb\",\"int\",0,255]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_mode[] PROGMEM =
"{\"tool_name\":\"self.car.set_mode\","
"\"command\":\"切换小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。\","
"\"params\":[[\"mode\",\"string\"],[\"distance\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char get_status[] PROGMEM =
"{\"tool_name\":\"self.car.get_status\","
"\"command\":\"获取超声波的距离时调用这个工具。 'distance'单位为厘米\","
"\"params\":[[\"status_name\",\"string\"]],"
"\"block\":\"true\","
"\"return\":\"true\"}";
const char servo[] PROGMEM =
"{\"tool_name\":\"self.car.servo\","
"\"command\":\"控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。\","
"\"params\":[[\"servo\",\"string\"],[\"count\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char *const string_table[] PROGMEM = {set_buzzer, move, set_rgb, set_mode, get_status, servo};2.初始化函数WonderLLM_Init()
设置IIC频率为400kHz。检测从设备,如果有响应则开始注册工具;如果没有响应,则打印“WonderLLM device not found”。
bool WonderLLM_Init(void) {
Wire.begin();
Wire.setClock(400000);
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
if (Wire.endTransmission() != 0) {
Serial.println(F("WonderLLM device not found."));
return false;
}
Serial.println(F("WonderLLM device found. Registering tools..."));
delay(100);
if (!register_tools()) {
Serial.println(F("Failed to register tools."));
return false;
}
WonderLLM_MCP_Finish();
return true;
}3.发送控制命令
Arduino主控通过 I2C 将 JSON 命令打包发送,WonderLLM 从机解析 JSON 命令,随后miniAuto执行相应动作(移动/亮灯/抓取等)。
void WonderLLM_Send_Action_Finish(void) {
char json_str[44];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}
void WonderLLM_Send_Status(const char* params_str) {
char json_str[56];
snprintf(json_str, sizeof(json_str), "{\"command\":\"status\",\"params\":[%s]}", params_str);
send_frame_ram(json_str);
}
static bool send_frame_ram(const char* ram_str) {
const size_t WIRE_BUFFER_SIZE = 32;
size_t total_len = strlen(ram_str);
if (total_len == 0) return true;
for (size_t offset = 0; offset < total_len; offset += WIRE_BUFFER_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > WIRE_BUFFER_SIZE) chunk_size = WIRE_BUFFER_SIZE;
Wire.write((const uint8_t*)ram_str + offset, chunk_size);
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) return false;
}
return true;
}
static bool send_frame_progmem(const char* progmem_str) {
size_t total_len = strlen_P(progmem_str);
if (total_len == 0) return true;
Serial.print(F("-> Sending:"));
char temp_buffer[total_len + 1];
strcpy_P(temp_buffer, progmem_str);
Serial.println(temp_buffer);
for (size_t offset = 0; offset < total_len; offset += MAX_FRAME_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > MAX_FRAME_SIZE) chunk_size = MAX_FRAME_SIZE;
const char* chunk_ptr = progmem_str + offset;
for (size_t i = 0; i < chunk_size; i++) {
Wire.write(pgm_read_byte(chunk_ptr + i));
}
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) {
Serial.println(F("I2C PROGMEM transmission error"));
return false;
}
}
return true;
}4.接收反馈
WonderLLM 执行完命令后,会通过 I²C 回发一帧数据。
bool receive_frame(char* buffer, uint16_t buffer_size, uint16_t* received_len) {
uint16_t data_len = 0;
uint16_t part_ID = 0;
uint16_t part_num = 0;
uint16_t total_received_len = 0;
// 初始化输出长度
*received_len = 0;
// 1. 接收第一个分片的头部
if (!receive_frame_head(&part_ID, &part_num, &data_len)) {
return false;
}
// 2. 检查是否是第一个分片,如果不是,则说明丢包,放弃本次接收
if (part_ID != 1) {
return false;
}
// 3. 循环接收所有分片
for (int i = 1; i <= part_num; i++) {
// 检查缓冲区是否足够容纳下一个分片
if (total_received_len + data_len > buffer_size) {
// 缓冲区空间不足,这是一个严重错误
return false;
}
// STM32代码中的延迟,这里保留
delay(10);
// 4. 请求当前分片的数据和1字节的校验和
uint8_t bytes_to_read = data_len + 1;
if (Wire.requestFrom(WonderLLM_SLAVE_ADDRESS, (int)bytes_to_read) != bytes_to_read) {
// 没收到期望长度的数据
return false;
}
// 5. 读取数据到缓冲区
// 注意:我们将数据直接读到缓冲区的正确位置 (total_received_len)
char* current_buffer_pos = buffer + total_received_len;
for (uint16_t j = 0; j < data_len; j++) {
current_buffer_pos[j] = Wire.read();
}
uint8_t received_checksum = Wire.read();
// 6. 校验数据
if (calculate_checksum((uint8_t*)current_buffer_pos, data_len) == received_checksum) {
// 校验成功,更新已接收的总长度
total_received_len += data_len;
} else {
// 校验失败,清空已接收的数据并退出
memset(buffer, 0, total_received_len);
*received_len = 0;
return false;
}
// 7. 如果不是最后一个分片,准备接收下一个分片的头部
if (i < part_num) {
delay(100);
uint16_t next_part_ID = 0;
uint16_t next_part_num = 0;
uint16_t next_data_len = 0;
if (!receive_frame_head(&next_part_ID, &next_part_num, &next_data_len)) {
// 接收下一个头部失败
return false;
}
// 8. 验证下一个分片的头部信息
// a) 分片ID是否连续? b) 总分片数是否保持一致?
if ((part_ID + 1 != next_part_ID) || (part_num != next_part_num)) {
// 分片不连续或总数不一致,说明丢包或数据错乱
return false;
}
// 更新当前分片ID和下一个分片的数据长度,为下一次循环做准备
part_ID = next_part_ID;
data_len = next_data_len;
}
}
// 所有分片成功接收并校验
*received_len = total_received_len;
return true;
}5.执行或视觉反馈
(1) 视觉命令
Arduino 向WonderLLM发送视觉请求 vision_request,WonderLLM返回 {"result":"left"} 或 {"result":"right"} 或 {"result":"none"}。
const char vision_request[] PROGMEM =
"{\"tool_name\":\"mcu.request\",\"command\":\"vision\",\"params\":\"判断画面中路标的方向,你的返回只能是left、right或者none,不要任何解释和说明\"}";
void WonderLLM_Request_Vision(void) {
send_frame_progmem(vision_request);
}(2) 动作命令
Arduino 发送 , WonderLLM 返回 {"status":"ok"} 或 action_finish 信号。
void WonderLLM_Send_Action_Finish(void) {
char json_str[64];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}- 智能管家
首先调用WonderLLM模块的摄像头观察是否有用户所描述的物体或画面,然后调用函数执行对应动作(例如小车移动,蜂鸣器鸣响,超声波模块灯光颜色等)。
8.7 智能搬运
8.7.1 项目介绍
本节课通过WonderLLM视觉模块实现对物体的智能搬运。
8.7.2 实现流程图
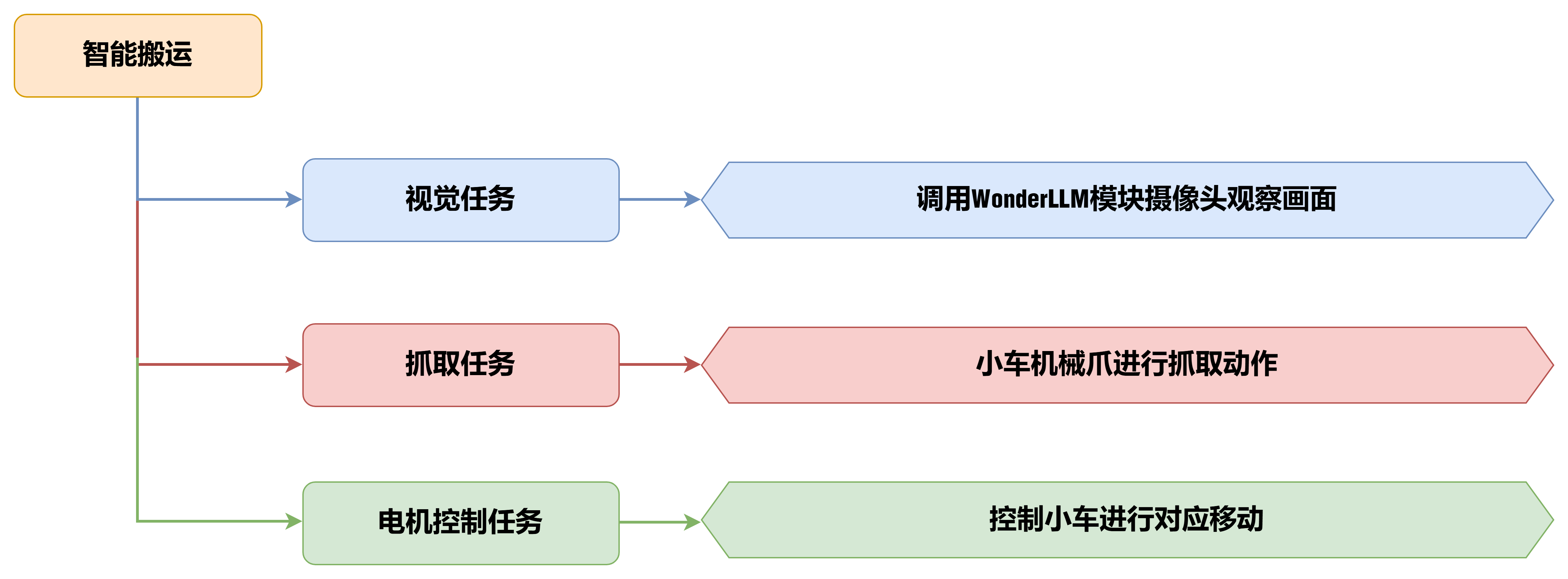
8.7.3 程序下载
NOTE
- 下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
- 接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开“02 程序文件\WonderLLM\WonderLLM.ino” 程序文件。
将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击左侧的库管理,导入PID库文件(如果已安装,可跳过此步骤)。
点击
,将程序下载至Arduino中,等待下载完成即可。**
8.7.4 实现效果
当对WonderLLM模块说出“如果前方有红色物体,就将它夹起来,然后在左边把它放下”相关指令时,小车会先识别物体颜色,如果为红色物体,会将该物体夹取并放在左边。
8.7.5 程序分析
以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.ino”
- 导入库文件
导入玩法所需的舵机控制库,IIC通信库,超声波模块控制库,以及WonderLLM模块的通讯库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include <Wire.h>
#include "Ultrasound.h"
#include "WonderLLM.h"- 定义全局变量及引脚
- 分别定义了状态标志变量,运动控制变量,时间控制变量,电压检测变量。
typedef enum {
NEXT_ACTION_NONE,
NEXT_ACTION_START_LINE_PATROL
} NextAction;
static NextAction next_action_on_move_finish = NEXT_ACTION_NONE;
bool is_moving = false; // 标志位,表示当前是否正在执行移动指令
unsigned long move_start_time = 0; // 移动开始的时间戳 (millis)
unsigned long move_duration_ms = 0; // 需要移动的总时长 (毫秒)
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t line_patrol_flag = 0;/* 巡线模式开关标志位 */
static uint8_t normal_flag = 0; /* 正常模式开关标志位 */
static uint8_t move_flag = 0; /* 移动标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static unsigned long last_poll_millis = 0;
#define POLL_INTERVAL_MS 100
#define RX_BUFFER_SIZE 128
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */- 分别定义了LED指示灯引脚,蜂鸣器控制引脚,舵机控制引脚以及电机速度和方向的控制引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 非阻塞控制状态机
包括蜂鸣器状态控制以及舵机状态控制。
// 非阻塞蜂鸣器状态
bool is_beeping = false;
int beep_times_left = 0;
unsigned long beep_next_change_time = 0;
bool beep_state_is_on = false; // 当前是否在发声
// 非阻塞舵机状态
bool is_servo_acting = false;
int servo_actions_left = 0;
unsigned long servo_next_change_time = 0;
bool servo_state_is_open = false; // 当前是否是张开状态- 硬件初始化
对串口,RGB灯,舵机,电机,WonderLLM模块以及蜂鸣器进行初始化。
void setup() {
Serial.begin(115200);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
delay(2000); /* 等待WonderLLM开机*/
WonderLLM_Init();
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);
}- 主循环loop()
在主循环中不断轮询和处理来自WonderLLM的指令。
void loop() {
// 在主循环中不断轮询和处理来自WonderLLM的指令
WonderLLM_Poll_And_Process();
updateCarMove();
Aovid();
Tracking_Line_Task();
if ( !is_servo_acting) {
Velocity_Controller(car_derection, speed_data, car_rot);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转)。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值。
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 };
// 修复了循环变量未初始化的bug
for(uint8_t i = 0; i < 4; ++i)
{
if(motors[i] < 0) {
direction[i] = !direction[i];
}
digitalWrite(motordirectionPin[i], direction[i]);
// 调用新的多通道软件PWM函数
PWM_Out_MultiChannel(i, motorpwmPin[i], abs(motors[i]));
}
}- 循环接收指令
每隔一段时间才检查一次上位机是否有新指令。
void WonderLLM_Poll_And_Process(void) {
if (millis() - last_poll_millis < POLL_INTERVAL_MS) {
return;
}
last_poll_millis = millis();定义接收缓冲区,用于存放接收到的 JSON 数据。
char rx_buffer[RX_BUFFER_SIZE];
uint16_t received_len = 0;通过 IIC 接口调用 receive_frame(), 从WonderLLM模块读取数据帧。
if (receive_frame(rx_buffer, RX_BUFFER_SIZE, &received_len)) {确保接收数据是有效的字符串(结尾加 \0),并调用 parse_command_manual() 解析 JSON 命令并执行动作。
if (received_len > 1) {
rx_buffer[received_len] = '\0'; // 确保是有效的C字符串
parse_command_manual(rx_buffer);
}
}- 手动解析JSON指令
用户对WonderLLM模块说出语音指令,WonderLLM模块转换为JSON。
strcpy_P(keyword_buffer, KEY_MOVE); // 使用字符串字面量更清晰
char time_key_buffer[10];
strcpy_P(time_key_buffer, KEY_TIME);
if (strstr(json_str, keyword_buffer) && strstr(json_str, time_key_buffer)) {
char* move_p = strstr(json_str, keyword_buffer);
char* time_p = strstr(json_str, time_key_buffer);
if (move_p != NULL && time_p != NULL) {
// 解析方向
move_p += strlen(keyword_buffer); // 跳过 "move":"
char* end_quote = strchr(move_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - move_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, move_p, len);
}
}
// 解析时间
time_p += strlen(time_key_buffer); // 跳过 "time":
int move_time_sec = atoi(time_p);
unsigned long move_time_ms = move_time_sec * 1000;
if (strlen(direction_buffer) > 0 && move_time_ms > 0) {
startMoveCar(direction_buffer, move_time_ms, 50);
return;
}
}
}解析舵机动作,调用 myservo.write()函数并通过控制舵机角度来实现机械爪张合以及物品抓取。
// --- 解析: 舵机 (寻找 "servo":) ---
else if (strstr(json_str, "\"servo\":")) {
is_servo_acting = true;
char* servo_p = strstr(json_str, "\"servo\":\"");
if (servo_p != NULL) {
// 解析动作
servo_p += 9; // 跳过 "servo":"
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
}
}
// 解析次数
int count = 1;
char* count_p = strstr(json_str, "\"count\":");
if (count_p) {
count_p += 8; // 跳过 "count":
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 90;
const int SERVO_CLAMP_ANGLE = 100;
if (strstr(action_buffer, "open") || strstr(action_buffer, "lay_down") ) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (strstr(action_buffer, "close")) {
myservo.write(SERVO_CLOSE_ANGLE);
}else if (strstr(action_buffer, "action")) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}}else if (strstr(action_buffer, "clamping") ) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action // --- 解析: 舵机 ("servo") ---
strcpy_P(keyword_buffer, KEY_SERVO);
if (strstr(json_str, keyword_buffer)) {
is_servo_acting = true;
char* servo_p = strstr(json_str, keyword_buffer);
servo_p += strlen_P(KEY_SERVO);
char* end_quote = strchr(servo_p, '"');
char action_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - servo_p;
if (len > 0 && len < 20) {
strncpy(action_buffer, servo_p, len);
int count = 1;
strcpy_P(keyword_buffer, KEY_SERVO_COUNT);
char* count_p = strstr(json_str, keyword_buffer);
if (count_p) {
count_p += strlen_P(KEY_SERVO_COUNT);
count = atoi(count_p);
}
const int SERVO_OPEN_ANGLE = 150;
const int SERVO_CLOSE_ANGLE = 95;
const int SERVO_CLAMP_ANGLE = 105;
strcpy_P(keyword_buffer, SERVO_ACTION_OPEN);
bool isOpen = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_LAY_DOWN);
bool isLayDown = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLOSE);
bool isClose = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_ACTION);
bool isAction = strcmp(action_buffer, keyword_buffer) == 0;
strcpy_P(keyword_buffer, SERVO_ACTION_CLAMPING);
bool isClamping = strcmp(action_buffer, keyword_buffer) == 0;
if (isOpen || isLayDown) {
myservo.write(SERVO_OPEN_ANGLE);
} else if (isClose) {
myservo.write(SERVO_CLOSE_ANGLE);
} else if (isAction) {
for (int i = 0; i < count; i++) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLOSE_ANGLE);
delay(500);
}
} else if (isClamping) {
myservo.write(SERVO_OPEN_ANGLE);
delay(500);
myservo.write(SERVO_CLAMP_ANGLE);
delay(500);
}
WonderLLM_Send_Action_Finish();
is_servo_acting = false;
return;
}
}
}_Finish();
is_servo_acting = false;
return;
}
}- 解析视觉指令
strcpy_P(keyword_buffer, KEY_VISION);
if (strstr(json_str, keyword_buffer)) {
char* vision_p = strstr(json_str, keyword_buffer);
if (vision_p != NULL) {
vision_p += strlen_P(KEY_VISION);
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0}; // 增加缓冲区大小
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}解析方向指令,调用startMoveCar函数控制机器人进行转向运动。
// --- 解析: 方向指令 (vision) ---
else if (strstr(json_str, "\"vision\":\"")) {
char* vision_p = strstr(json_str, "\"vision\":\"");
if (vision_p != NULL) {
// 1. 解析方向字符串
vision_p += 10; // 跳过 "vision":"
char* end_quote = strchr(vision_p, '"');
char direction_buffer[20] = {0};
if (end_quote != NULL) {
int len = end_quote - vision_p;
if (len > 0 && len < 20) {
strncpy(direction_buffer, vision_p, len);
}
}
// 2. 根据方向执行动作,识别方向与机器人方向相反
if (strcmp(direction_buffer, "left") == 0) {
//向右转
startMoveCar("right", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
} else if (strcmp(direction_buffer, "right") == 0) {
// 向左转
startMoveCar("left", 1000, 50, NEXT_ACTION_START_LINE_PATROL);
}
WonderLLM_Send_Action_Finish();
return;
}
}
}以下分析的程序路径为:“02 程序文件/WonderLLM/WonderLLM.cpp”
- WonderLLM通信流程
1.工具注册JSON数据
注册了蜂鸣器控制工具,小车移动控制工具,RGB灯控制工具,小车运行模式切换工具,超声波距离获取,机械爪控制工具,系统配置命令工具。这些字符串都被加入到一个 string_table 表中,供注册函数批量发送。
// --- PROGMEM 数据 ---
const char set_buzzer[] PROGMEM =
"{\"tool_name\":\"self.car.set_buzzer\","
"\"command\":\"控制小车的蜂鸣器时调用这个工具。buzzer是蜂鸣器响的次数。\","
"\"params\":[[\"buzzer\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char move[] PROGMEM =
"{\"tool_name\":\"self.car.move\","
"\"command\":\"控制小车移动时调用这个工具。move参数为移动方向,可移动的方向包括:'forward', 'backward','turn_left','turn_right','pan_right','pan_right',time为移动时间,单位是秒,速度是0.25米每秒,旋转的速度是90度每秒。\","
"\"params\":[[\"move\",\"string\"],[\"time\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_rgb[] PROGMEM =
"{\"tool_name\":\"self.car.set_rgb\","
"\"command\":\"设置左右RGB灯颜色。lr,lg,lb是左灯RGB, rr,rg,rb是右灯RGB, 范围0-255。\","
"\"params\":[[\"lr\",\"int\",0,255],[\"lg\",\"int\",0,255],[\"lb\",\"int\",0,255],"
"[\"rr\",\"int\",0,255],[\"rg\",\"int\",0,255],[\"rb\",\"int\",0,255]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char set_mode[] PROGMEM =
"{\"tool_name\":\"self.car.set_mode\","
"\"command\":\"切换小车的模式时调用这个工具。'distance'只在避障模式下使用。可切换的模式包括:'avoid', 'line_patrol','normal'。\","
"\"params\":[[\"mode\",\"string\"],[\"distance\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char get_status[] PROGMEM =
"{\"tool_name\":\"self.car.get_status\","
"\"command\":\"获取超声波的距离时调用这个工具。 'distance'单位为厘米\","
"\"params\":[[\"status_name\",\"string\"]],"
"\"block\":\"true\","
"\"return\":\"true\"}";
const char servo[] PROGMEM =
"{\"tool_name\":\"self.car.servo\","
"\"command\":\"控制小车爪子夹取时调用这个工具。servo参数控制爪子,包括:'action', 'clamping', 'lay_down','open','close',count是爪子开合的次数。\","
"\"params\":[[\"servo\",\"string\"],[\"count\",\"int\"]],"
"\"block\":\"true\","
"\"return\":\"false\"}";
const char *const string_table[] PROGMEM = {set_buzzer, move, set_rgb, set_mode, get_status, servo};2.初始化函数WonderLLM_Init()
设置IIC频率为400kHz。检测从设备,如果有响应则开始注册工具;如果没有响应,则打印“WonderLLM device not found”。
bool WonderLLM_Init(void) {
Wire.begin();
Wire.setClock(400000);
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
if (Wire.endTransmission() != 0) {
Serial.println(F("WonderLLM device not found."));
return false;
}
Serial.println(F("WonderLLM device found. Registering tools..."));
delay(100);
if (!register_tools()) {
Serial.println(F("Failed to register tools."));
return false;
}
WonderLLM_MCP_Finish();
return true;
}3.发送控制命令
Arduino主控通过 I2C 将 JSON 命令打包发送,WonderLLM 从机解析 JSON 命令,随后miniAuto执行相应动作(移动/亮灯/抓取等)。
void WonderLLM_Send_Action_Finish(void) {
char json_str[44];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}
void WonderLLM_Send_Status(const char* params_str) {
char json_str[56];
snprintf(json_str, sizeof(json_str), "{\"command\":\"status\",\"params\":[%s]}", params_str);
send_frame_ram(json_str);
}
static bool send_frame_ram(const char* ram_str) {
const size_t WIRE_BUFFER_SIZE = 32;
size_t total_len = strlen(ram_str);
if (total_len == 0) return true;
for (size_t offset = 0; offset < total_len; offset += WIRE_BUFFER_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > WIRE_BUFFER_SIZE) chunk_size = WIRE_BUFFER_SIZE;
Wire.write((const uint8_t*)ram_str + offset, chunk_size);
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) return false;
}
return true;
}
static bool send_frame_progmem(const char* progmem_str) {
size_t total_len = strlen_P(progmem_str);
if (total_len == 0) return true;
Serial.print(F("-> Sending:"));
char temp_buffer[total_len + 1];
strcpy_P(temp_buffer, progmem_str);
Serial.println(temp_buffer);
for (size_t offset = 0; offset < total_len; offset += MAX_FRAME_SIZE) {
Wire.beginTransmission(WonderLLM_SLAVE_ADDRESS);
size_t chunk_size = total_len - offset;
if (chunk_size > MAX_FRAME_SIZE) chunk_size = MAX_FRAME_SIZE;
const char* chunk_ptr = progmem_str + offset;
for (size_t i = 0; i < chunk_size; i++) {
Wire.write(pgm_read_byte(chunk_ptr + i));
}
bool is_last_chunk = (offset + chunk_size) >= total_len;
if (Wire.endTransmission(is_last_chunk) != 0) {
Serial.println(F("I2C PROGMEM transmission error"));
return false;
}
}
return true;
}4.接收反馈
WonderLLM 执行完命令后,会通过 I²C 回发一帧数据。
bool receive_frame(char* buffer, uint16_t buffer_size, uint16_t* received_len) {
uint16_t data_len = 0;
uint16_t part_ID = 0;
uint16_t part_num = 0;
uint16_t total_received_len = 0;
// 初始化输出长度
*received_len = 0;
// 1. 接收第一个分片的头部
if (!receive_frame_head(&part_ID, &part_num, &data_len)) {
return false;
}
// 2. 检查是否是第一个分片,如果不是,则说明丢包,放弃本次接收
if (part_ID != 1) {
return false;
}
// 3. 循环接收所有分片
for (int i = 1; i <= part_num; i++) {
// 检查缓冲区是否足够容纳下一个分片
if (total_received_len + data_len > buffer_size) {
// 缓冲区空间不足,这是一个严重错误
return false;
}
// STM32代码中的延迟,这里保留
delay(10);
// 4. 请求当前分片的数据和1字节的校验和
uint8_t bytes_to_read = data_len + 1;
if (Wire.requestFrom(WonderLLM_SLAVE_ADDRESS, (int)bytes_to_read) != bytes_to_read) {
// 没收到期望长度的数据
return false;
}
// 5. 读取数据到缓冲区
// 注意:我们将数据直接读到缓冲区的正确位置 (total_received_len)
char* current_buffer_pos = buffer + total_received_len;
for (uint16_t j = 0; j < data_len; j++) {
current_buffer_pos[j] = Wire.read();
}
uint8_t received_checksum = Wire.read();
// 6. 校验数据
if (calculate_checksum((uint8_t*)current_buffer_pos, data_len) == received_checksum) {
// 校验成功,更新已接收的总长度
total_received_len += data_len;
} else {
// 校验失败,清空已接收的数据并退出
memset(buffer, 0, total_received_len);
*received_len = 0;
return false;
}
// 7. 如果不是最后一个分片,准备接收下一个分片的头部
if (i < part_num) {
delay(100);
uint16_t next_part_ID = 0;
uint16_t next_part_num = 0;
uint16_t next_data_len = 0;
if (!receive_frame_head(&next_part_ID, &next_part_num, &next_data_len)) {
// 接收下一个头部失败
return false;
}
// 8. 验证下一个分片的头部信息
// a) 分片ID是否连续? b) 总分片数是否保持一致?
if ((part_ID + 1 != next_part_ID) || (part_num != next_part_num)) {
// 分片不连续或总数不一致,说明丢包或数据错乱
return false;
}
// 更新当前分片ID和下一个分片的数据长度,为下一次循环做准备
part_ID = next_part_ID;
data_len = next_data_len;
}
}
// 所有分片成功接收并校验
*received_len = total_received_len;
return true;
}5.执行或视觉反馈
(1) 视觉命令
Arduino 向WonderLLM发送视觉请求 vision_request,WonderLLM返回 {"result":"left"} 或 {"result":"right"} 或 {"result":"none"}。
const char vision_request[] PROGMEM =
"{\"tool_name\":\"mcu.request\",\"command\":\"vision\",\"params\":\"判断画面中路标的方向,你的返回只能是left、right或者none,不要任何解释和说明\"}";
void WonderLLM_Request_Vision(void) {
send_frame_progmem(vision_request);
}(2) 动作命令
Arduino 发送 , WonderLLM 返回 {"status":"ok"} 或 action_finish 信号。
void WonderLLM_Send_Action_Finish(void) {
char json_str[64];
snprintf(json_str, sizeof(json_str), "{\"command\":\"action_finish\",\"params\":\"true\"}");
send_frame_ram(json_str);
}- 智能搬运
首先调用WonderLLM模块的摄像头观察是否有红色物体,然后通过控制舵机角度来控制机械爪进行抓取,最后再调用函数startMoveCar()控制miniAuto AI小车进行移动。