12. 串口通信实操课程
12.1 设备主从通讯原理
本节旨在为用户介绍关于miniAuto在与不同设备(如STM32、51单片机、Arduino、树莓派等)通信时的主从关系的详细信息,理解miniAuto是如何作为从机与其他设备进行通信的,以及其他设备如何作为主机控制miniAuto。
本章中miniAuto都是作为从机设备,通过UART串口与其他设备进行信息传输。
12.1.1 主从关系
在主从机控制系统中,miniAuto作为从机设备,其他单片机等设备作为主机。
- miniAuto作为从机的功能
- 接收解析主机发送的信号:
等待串口信号,若串口有数据接收到,则根据通讯协议解析串口数据,可以根据数据信息调用对应的函数功能。
- 根据接收数据调用miniAuto的功能:
当解析出信号时,就需要调用对应的miniAuto本设备功能,如滑杆控制、RGB灯颜色调节、速度调节等。
- 数据封装与反馈:
当接收到读取命令时,则需要调用对应的读取函数后,将读取到的数据根据通讯协议封装为数据包,并发送给主机设备。
- 其他设备作为主机
指令封装与发送:
主机需要将控制指令和数据根据通讯协议封装为数据包,发送给设备。
控制协调:
主机设备需管理好整个系统的协同工作,确保miniAuto和其他设备之间的通信和操作无冲突,保持良好的工作状态。
- 数据接收:
主机读取舵机状态时,在发送读取指令后,需要接收miniAuto发送的状态信息数据,确保数据的完整性和正确性,并解析数据包,提取其中的有用信息。
12.1.2 硬件连接
以miniAuto接入PC为例:
将USB转接器的TXD、RXD、GND通过杜邦线分别连接至miniAuto上接口3的IO32、IO33、GND,再将USB转接器接入电脑即可。(温馨提示:可以不接5V,但一定要接GND)
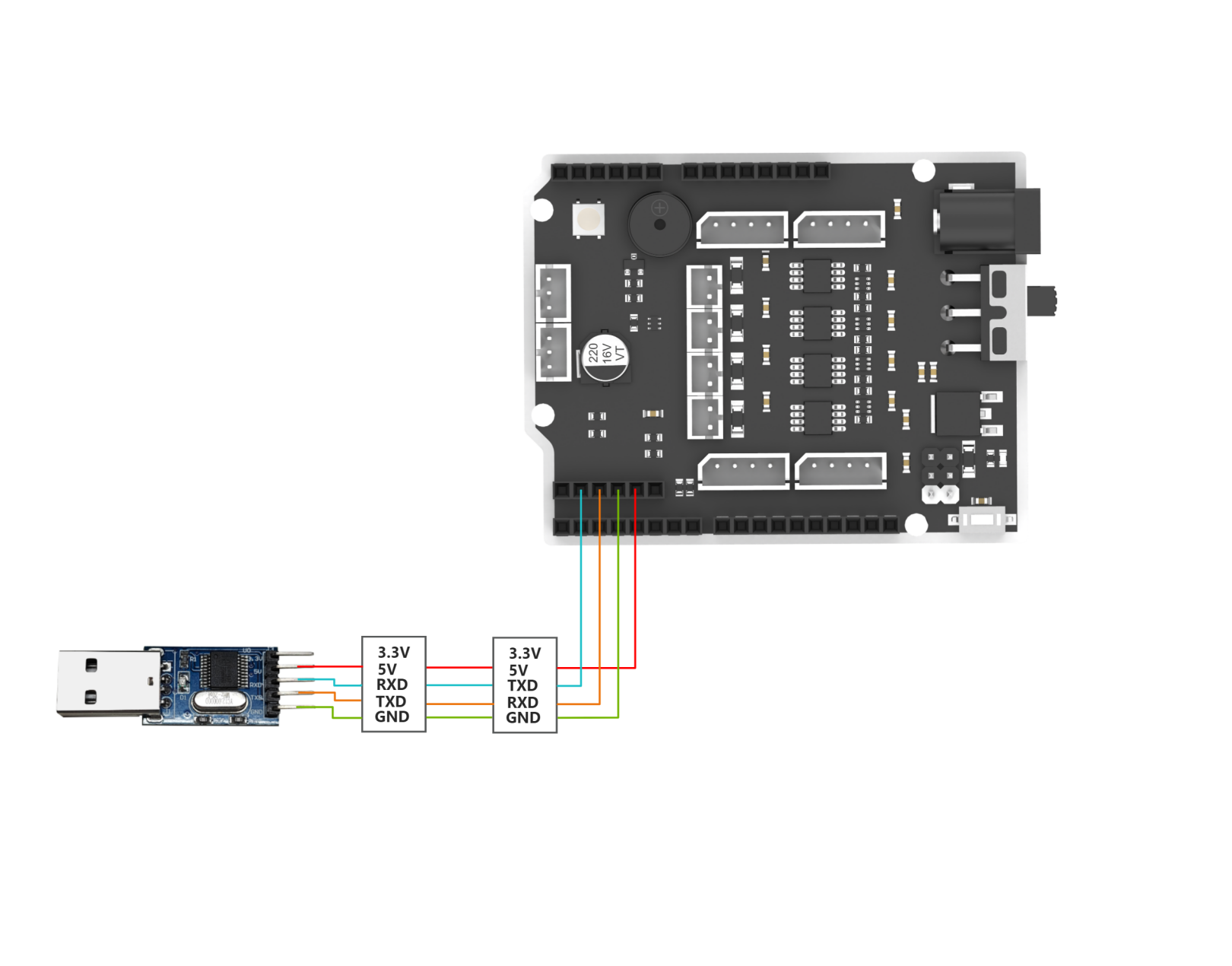
NOTE
主机设备与miniAuto的供电电源可以不同,但在连接时必须要共地,才可以提供稳定的通讯电平。
设备在接线时要注意UART串口的TX、RX引脚要交叉接线,否则不可通讯。
12.1.3 数据传输格式
miniAuto的UART串口数据发送格式默认为:
| 波特率 | 9600 |
|---|---|
| 数据位 | 8 |
| 校验位 | None |
| 停止位 | 1 |
12.1.4 通信协议
主机发给miniAuto的命令格式为:以功能码开头,中间用“|”号隔开,最后以“&”结尾。(具体格式详见下一小节的介绍)
12.2 PC串口控制
本文通过PC串口依次实现了miniAuto的滑杆控制、RGB灯颜色调节、速度调节、超声波和电池电量查询、舵机控制、避障功能开关。
12.2.1 实现原理
NOTE
本节内容需要在下载了miniAuto从机端程序的基础上实现,请先下载本文档同路径下的“miniAuto从机端程序”。
- miniAuto与TTL进行串行连接后接入PC机进行串口通信,实现串口控制miniAuto,其UART串口数据发送格式默认为:
| 波特率 | 9600 |
|---|---|
| 数据位 | 8 |
| 校验位 | None |
| 停止位 | 1 |
- 通信协议:
下面我们对协议指令包的格式进行说明,协议指令包格式如下:以功能码开头,中间用“|”号隔开,最后以“&”结尾。
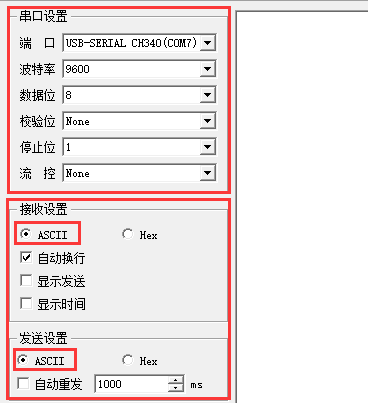
12.2.2 准备工作
首先需要在本节内容同路径下“03 串口调试助手工具”内找到串口工具。

打开串口调试工具后,请确保串口传输助手的波特率设置为9600、校验位为NONE、数据位为8、停止位为1,并勾选以ASCII发送,配置如下图所示:
12.2.3 功能实现
通过发送协议指令来进行控制miniAuto:
- 指令名:滑杆控制
①功能码:A
②子功能码:
| 子功能码 | 子功能名 | 命令数据 |
|---|---|---|
| 0 | 左移 | 无 |
| 1 | 左斜向前 | 无 |
| 2 | 前进 | 无 |
| 3 | 右斜向前 | 无 |
| 4 | 右移 | 无 |
| 5 | 右斜向后 | 无 |
| 6 | 后移 | 无 |
| 7 | 左斜向后 | 无 |
| 8 | 停止 | 无 |
| 9 | 原地左转 | 无 |
| 10 | 原地右转 | 无 |
命令数据:根据子功能选择相应的命令数据输入,若不需填写命令数据,留空即可。
举例:以发送命令数据“A|2|&”为例,该命令是用于打开miniAuto的前进功能。

- 指令名:RGB颜色调节
①功能码:B
②参数数据:
| 参数 | 物理含义 | 取值范围 |
|---|---|---|
| r | RGB灯红光光强 | 0-255 |
| g | RGB灯绿光光强 | 0-255 |
| b | RGB灯蓝光光强 | 0-255 |
说明:本指令的三个参数,在下达本功能指令时需要全部输入,输入顺序:r-g-b。
命令数据:请确保每一个参数的取值都在有效范围之内,输入数据为整数。
举例:以发送命令数据“B|255|0|0|&”为例,该命令是用于让RGB灯亮红光。

- 指令名:速度调节
①功能码:C
②参数数据:
| 参数 | 物理含义 | 取值范围 |
|---|---|---|
| x | 直线运动速度 | 10-100 |
说明:1.该命令用于控制miniAuto的运动。
2.该命令执行之后,小车不会立刻按照此速度开始运动,此时设置的速度会写入小车内部,等待小车下一次开启运动时,才会按照此速度运动。
命令数据:请确保每一个参数的取值都在有效范围之内,输入数据为整数。
举例:以命令数据“C|50|&”为例,该命令让miniAuto以50的直线速度前进。

指令发送出去后,miniAuto收到指令之后会重新发送回来作为回应。

- 指令名:超声波数据和电池电量数据查询
①功能码:D
②参数:无参数
举例:以发送命令数据“D|&”为例,该命令是获取miniAuto的超声波检测的距离和电池剩余电量。

数据发送后miniAuto会返回请求数据,返回的数据格式为:“$x,y$”,其中x
就是我们需要获取的距离数据(单位:mm),y就是我们需要获取的电池容量(单位:mv)。

- 指令名:舵机控制:
功能码:E
参数:
| 参数 | 物理含义 | 取值范围 |
|---|---|---|
| x | Minauto舵机旋转角度 | 0-60 |
NOTE
该命令用于控制舵机旋转,从而带动机械爪张开闭合。
为了放置舵机带动机械爪运动时不会碰撞机体,影响演示效果,我们此处对于舵机运动角度的输入做了一定的优化,舵机最佳的运动参数在0-60间。
命令数据:舵机转动角越小,机械爪越收拢,反之越张开。
举例:以发送命令数据“E|30|&”为例,该命令是让舵机以30°转动

- 指令名:避障功能开关
功能码:F
NOTE
该命令用于开关miniAuto的避障功能。
开启避障功能之后,小车默认会开始直线运动,此时的运动速度是不受速度调节指令控制的。
参数:
| 参数 | 物理含义 | 取值范围 |
| x | 避障功能开关标志位 | 0:关闭避障 1:开启避障 |
举例:以发送命令数据“F|1|&”为例,该命令用于打开小车避障功能。
