6. 二次开发项目课程
6.1 二次开发库文件介绍
为方便程序调用,会用到了一些库文件。其中包含Arduino官方库文件“Servo、tone”和我们自定义的库文件“Ultrasound、FastLED”。
本节会对课程所用到的自定义库文件及主要程序进行说明(其中FastLED库已封装,本文将不再对它做分析)。
6.1.1 超声波库文件(Ultrasound)
Ultrasound是控制发光超声波模块发送、读取信息、设置模块上RGB灯的颜色以及获取测量距离的库函数。在后续的声波测距、声波抓球玩法中需要调用该函数,来实现检测距离及控制模块灯颜色变化的功能。
下面就其中几个使用频率较高的函数来进行说明。
- 成员函数(Ultrasound::Color)
void Ultrasound::Color(uint8_t r1, uint8_t g1, uint8_t b1, uint8_t r2, uint8_t g2, uint8_t b2)
{
uint8_t RGB[6];
uint8_t value = RGB_WORK_SIMPLE_MODE;
wireWriteDataArray(ULTRASOUND_I2C_ADDR, RGB_WORK_MODE,&value,1);
RGB[0] = r1;RGB[1] = g1;RGB[2] = b1;//RGB1
RGB[3] = r2;RGB[4] = g2;RGB[5] = b2;//RGB2
wireWriteDataArray(ULTRASOUND_I2C_ADDR, RGB1_R,RGB,6);
}这是一个Ultrasound类的其中一个成员函数,主要是用于控制发光超声波模块上RGB灯的颜色。它接收六个参数,分别是r1、g1、b1和r2、b2、g2,分别代表发光超声波模块上左右两个RGB灯的红绿蓝三色。该函数的相关描述可参考下表:
| Ultrasound::Color() | |||
| 函数描述 | 控制发光超声波的RGB灯颜色 | ||
| 参数列表 | r1、g1、b1、r2、g2、b2 | 返回值 | 无 |
| 使用说明 |
| ||
在函数中使用wireWriteDataArray来向发光超声波传感器的I2C地址写入数据。它向地址ULTRASOUND_I2C_ADDR写入一个字节的数据,该数据是RGB_WORK_SIMPLE_MODE的值。
然后将前面传入的两种颜色(RGB1和RGB2)的值分别赋给RGB数组的前六个元素。最后再次使用wireWriteDataArray函数,将前面设置的两种颜色的RGB值通过I2C协议发送给超声波传感器。
- 成员函数(Ultrasound::GetDistance)
这是一个Ultrasound类的其中一个成员函数,用于从发光超声波模块获取距离数据。
代码使用wireReadDataArray的函数从超声波传感器的I2C地址读取数据。从地址ULTRASOUND_I2C_ADDR的偏移量0处开始,读取2个字节的数据,并将这些数据存储在distance变量中,即获取到超声波模块的距离数据。
//获取超声波测得的距离单位mm
u16 Ultrasound::GetDistance()
{
u16 distance;
wireReadDataArray(ULTRASOUND_I2C_ADDR, 0,(uint8_t *)&distance,2);
return distance;
}| Ultrasound::GetDistance() | |||
| 函数描述 | 直接获取发光超声波模块的测量距离 | ||
| 参数列表 | 无 | 返回值 | 返回u16类型的距离测量值 |
| 使用说明 |
| ||
Filter一个Ultrasound类的其中一个成员函数,用于在
GetDistance函数获取的数据之后对其进行滤波,减少干扰,获得一个更加平滑的平均值。首先程序定义了滤波器的大小为3,用于存储最近读取的三个超声波测值。声明了一个静态整数数组
filter_buf,其大小为FILTER_N + 1(即4)。从
GetDistance读取一个新的测值,并将其存储在filter_buf数组的最后一个位置。当数据累积到一定数量时,将filter_buf数组中的所有数据左移一位(丢弃最低位的数据),并将所有数据累加到filter_sum变量中,便于计算所有存储数据的总和。最后,函数返回计算得到的平均值。这个平均值是通过将累加的总和除以滤波器的长度来计算的,结果被强制转换为整数类型并返回。
/* 递推平均滤波法*/
int Filter() {
int i;
int filter_sum = 0;
filter_buf[FILTER_N] = ultrasound.GetDistance();///< 读取超声波测值
for(i = 0; i < FILTER_N; i++) {
filter_buf[i] = filter_buf[i + 1];///< 所有数据左移,低位仍掉
filter_sum += filter_buf[i];
}
return (int)(filter_sum / FILTER_N);
}| Ultrasound::Filter() | |||
| 函数描述 | 获取滤波后的测量值 | ||
| 参数列表 | 无 | 返回值 | 返回int类型的滤波后的距离测量值 |
| 使用说明 |
| ||
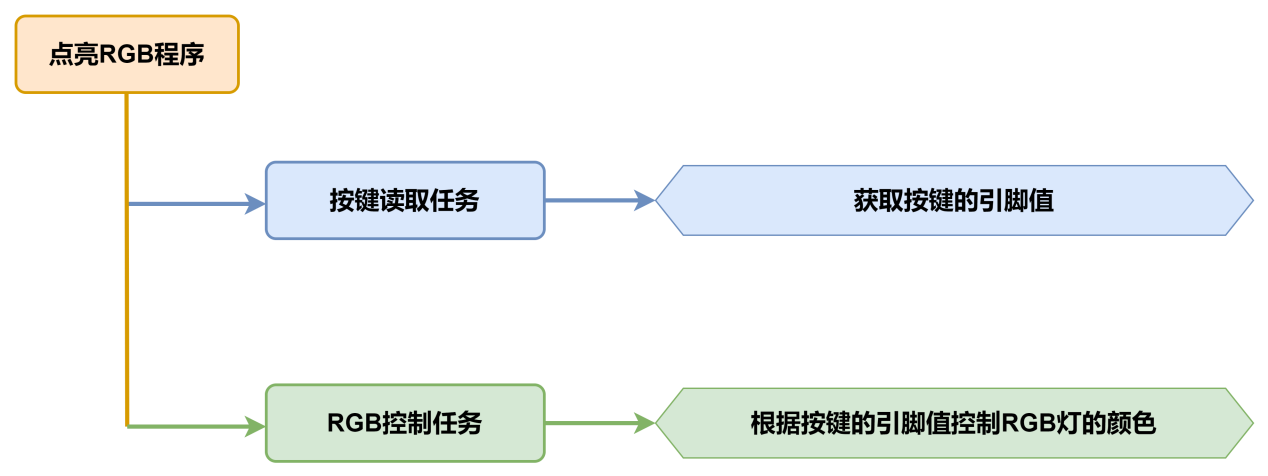
6.2 点亮RGB说明
本节通过读取Arduino扩展板上的板载按键状态,来控制RGB灯的颜色。
6.2.1 实现流程图
6.2.2 板载RGB灯

板载RGB灯使用的是RGB LED灯珠,灯珠的RGB三色可单独设置显示亮度,能够实现多彩混合的显示效果。
6.2.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,容易造成短路。
在本文档同路径下找到“02 程序文件\点亮RGB程序\rgb_test\rgb_test.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。
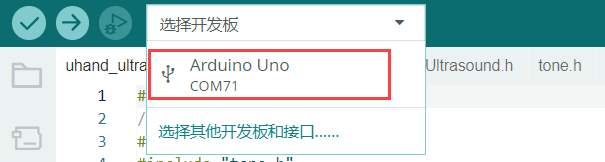
点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
 ,将程序下载至Arduino中,等待下载完成即可。
,将程序下载至Arduino中,等待下载完成即可。

6.2.4 实现效果
打开小车电源后,Arduino扩展板上的RGB彩灯为红色,按下扩展板上的KEY1按键时,RGB彩灯会从红色变为白色,松开按键后则变回红色。
6.2.5 程序简要分析
- 导入库文件
#include "FastLED.h"导入本玩法所需要的RGB控制库。
- 定义引脚及创建对象
- 定义了一个RGB灯引脚以及按键引脚。
const static uint8_t ledPin = 2;
const static uint8_t keyPin = 3;
static CRGB rgbs[1];- 创建了RGB灯对象,同时还创建了一个用于储存按键状态的变量。
static CRGB rgbs[1];
bool keyState; ///< 按键状态检测- 初始化设置
- 在
setup()函数中,主要是对相关的硬件设备进行初始化。首先是串口,将其通信的波特率设置为9600。
void setup() {
Serial.begin(9600); // 初始化串口通信- 将按键引脚配置为输入IO,上电后的引脚值默认为低电平。使用FastLED库初始化扩展板上的RGB灯,并将其连接到ledPin引脚。通过调用
Rgb_Show(255,255,255)函数设置RGB颜色为白色。
pinMode(keyPin, INPUT);
FastLED.addLeds<WS2812, ledPin, GRB>(rgbs, 1);
Rgb_Show(255,255,255);
}- 主程序
在loop()函数中,首先通过analogRead()函数读取按键的引脚值,再判断按键引脚值并控制RGB灯的颜色。如果读取到的按键引脚值为0(低电平,表示按键被按下),则控制RGB灯的颜色为白色。若读取到的引脚值为1(高电平,按键未被按下),则控制RGB灯的颜色为红色。
void loop() {
keyState = analogRead(keyPin);
if(keyState) Rgb_Show(255,0,0);
else Rgb_Show(255,255,255);
delay(100);
}- RGB控制函数
在Rgb_Show()控制函数中,通过传递的三个参数来设置RGB灯的颜色,rValue对应的是红色,gValue对应的是绿色,bValue则对应的是蓝色。R、G、B三种颜色的取值范围是0-255,最后通过FastLED.show()函数显示颜色。
/**
* @brief 设置RGB灯的颜色
* @param rValue;gValue;bValue;
* @arg 三个入口参数取值分别为:0~255;
* @retval None
* @note (255,0,0)红色 (0,255,0)绿色 (0,0,255)蓝色 (255,255,255)白色
*/
void Rgb_Show(uint8_t rValue,uint8_t gValue,uint8_t bValue) {
rgbs[0].r = rValue;
rgbs[0].g = gValue;
rgbs[0].b = bValue;
FastLED.show();
}6.2.6 功能延伸
这里以修改RGB彩灯的颜色为例来进行说明,从原来的红色修改为绿色。具体修改内容可参考下面步骤:
- 找到主程序中控制RGB颜色的函数
Rgb_show(),函数的三个参数分别对应着红色、绿色、蓝色。
if(keyState) Rgb_Show(255,0,0);- 将原先红色的值改为0,再将绿色的值改为255,即可将RGB灯的颜色更改为绿色。
if(keyState) Rgb_Show(0,255,0);关于RGB颜色表,可前往链接进行查询:https://www.bchrt.com/tools/rgbcolor/
6.2.7 常见问题解答
问:代码上传失败。
答:请检查您是否有将蓝牙模块连接至小车上,若有请取出蓝牙模块后再进行下载。
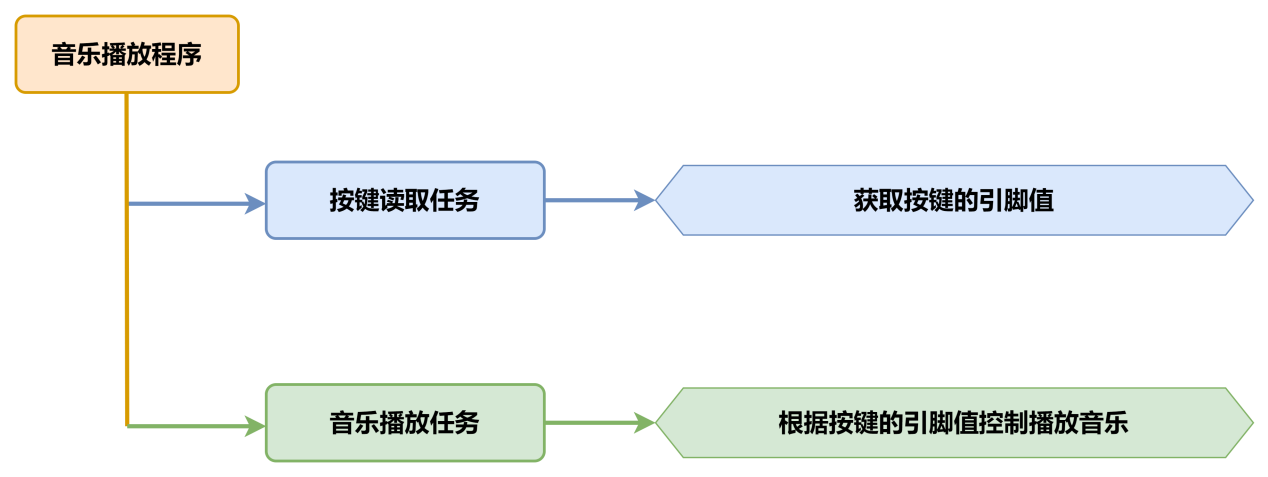
6.3 音乐播放说明
本节介绍通过读取Arduino扩展板上的板载按键状态,控制音乐的播放。
6.3.1 实现流程图
6.3.2 板载蜂鸣器

板载蜂鸣器使用的是5V蜂鸣器,通过控制输出PWM信号的频率,即可控制蜂鸣器发出不同声调的声音。
6.3.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
在本文档同路径下找到“02 程序文件\音乐播放程序\buzzer_test\buzzer_test.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。
点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.3.4 实现效果
打开小车电源后,按下Arduino扩展板上的KEY1按键后,会控制蜂鸣器发出一段音乐。
6.3.5 程序简要分析
- 导入库文件
#include "tone.h"导入本玩法所需要的tone音调库。
- 定义引脚及创建对象
- 首先对蜂鸣器播放音乐的音调进行了定义。
/* 超级玛丽 */
static int song[98] = {
NOTE_E4, NOTE_E4, NOTE_E4, NOTE_C4, NOTE_E4, NOTE_G4, NOTE_G3,
NOTE_C4, NOTE_G3, NOTE_E3, NOTE_A3, NOTE_B3, NOTE_AS3, NOTE_A3, NOTE_G3, NOTE_E4, NOTE_G4, NOTE_A4, NOTE_F4, NOTE_G4, NOTE_E4, NOTE_C4, NOTE_D4, NOTE_B3,
NOTE_C4, NOTE_G3, NOTE_E3, NOTE_A3, NOTE_B3, NOTE_AS3, NOTE_A3, NOTE_G3, NOTE_E4, NOTE_G4, NOTE_A4, NOTE_F4, NOTE_G4, NOTE_E4, NOTE_C4, NOTE_D4, NOTE_B3,
NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_GS3, NOTE_A3, NOTE_C4, NOTE_A3, NOTE_C4, NOTE_D4, NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_C5, NOTE_C5, NOTE_C5,
NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_GS3, NOTE_A3, NOTE_C4, NOTE_A3, NOTE_C4, NOTE_D4, NOTE_DS4, NOTE_D4, NOTE_C4,
NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4, NOTE_C4, NOTE_A3, NOTE_G3, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4,
NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4, NOTE_C4, NOTE_A3, NOTE_G3
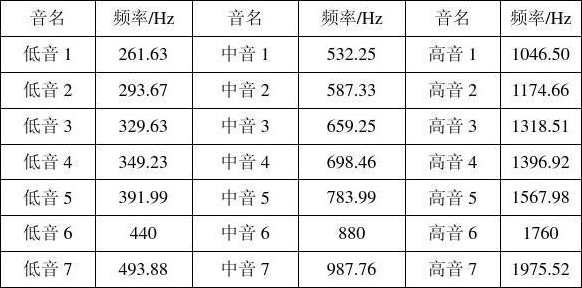
};- 然后定义了音乐的节拍,每个音调的节拍对应着这个音调的相对持续时间,我们在程序中以一秒一个节拍作为歌曲播放节奏。
static int noteDurations[98] = {
8,4,4,8,4,2,2,
3,3,3,4,4,8,4,8,8,8,4,8,4,3,8,8,3,
3,3,3,4,4,8,4,8,8,8,4,8,4,3,8,8,2,
8,8,8,4,4,8,8,4,8,8,3,8,8,8,4,4,4,8,2,
8,8,8,4,4,8,8,4,8,8,3,3,3,1,
8,4,4,8,4,8,4,8,2,8,4,4,8,4,1,
8,4,4,8,4,8,4,8,2
};- 对蜂鸣器以及按键引脚进行了定义,同时创建了两个变量,
keyState用于储存按键的状态,playMusic用作判断是否播放音乐。
const static uint8_t buzzerPin = 3; ///< 按键状态检测
const static uint8_t keyPin = A3;
bool keyState; ///< 按键状态检测
bool taskStart = 0;- 初始化设置
- 在
setup()函数中,主要是对相关的硬件设备进行初始化。首先是串口,将其通信的波特率设置为9600,并设置读取数据超时时间为500ms。
void setup() {
pinMode(keyPin, INPUT);
Serial.begin(9600);
// 设置串行端口读取数据的超时时间
Serial.setTimeout(500);
}- 将按键引脚配置为输入IO,上电后的引脚值默认为低电平。
pinMode(keyPin, INPUT);
Serial.begin(9600);- 主程序
在loop()函数中,首先通过analogRead()函数读取按键的引脚值,再判断按键引脚值并控制RGB灯的颜色。如果读取到的按键引脚值为0(低电平,表示按键被按下),则调用tune_task()函数控制蜂鸣器播放音乐。
void loop() {
keyState = analogRead(keyPin); //检测按键状态
if (!keyState) taskStart = 1;
if (taskStart)
{
tune_task(); // 播放音乐
taskStart = 0;
}
}- 音乐播放函数
- 循环遍历每一个获取音调和对应的节拍(播放持续时间),首先将节拍换算成对应的播放持续时间;之后将配置信息传至蜂鸣器开始播放。
- 为了播放的真实效果,每个音调播放完成后需要好有一定时间停顿,我们默认每个音调的停顿间隔=1.3*播放持续时间。
void tune_task(void) {
for (int thisNote = 0; thisNote <98; thisNote++)
{
int noteDuration = 1000/noteDurations[thisNote];
// 计算每个节拍的时间,以一个节拍一秒为例,四分之一拍就是1000/4毫秒,八分之一拍就是1000/8毫秒
tone(buzzerPin, song[thisNote],noteDuration);
int pauseBetweenNotes = noteDuration * 1.10;
//每个音符间的停顿间隔,以该音符的130%为佳
delay(pauseBetweenNotes);
noTone(buzzerPin);
}
}6.3.6 功能延伸
- 如果想要修改播放的音乐,可以通过修改蜂鸣器的音调以及节拍来实现。
/* 超级玛丽 */
static int song[98] = {
NOTE_E4, NOTE_E4, NOTE_E4, NOTE_C4, NOTE_E4, NOTE_G4, NOTE_G3,
NOTE_C4, NOTE_G3, NOTE_E3, NOTE_A3, NOTE_B3, NOTE_AS3, NOTE_A3, NOTE_G3, NOTE_E4, NOTE_G4, NOTE_A4, NOTE_F4, NOTE_G4, NOTE_E4, NOTE_C4, NOTE_D4, NOTE_B3,
NOTE_C4, NOTE_G3, NOTE_E3, NOTE_A3, NOTE_B3, NOTE_AS3, NOTE_A3, NOTE_G3, NOTE_E4, NOTE_G4, NOTE_A4, NOTE_F4, NOTE_G4, NOTE_E4, NOTE_C4, NOTE_D4, NOTE_B3,
NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_GS3, NOTE_A3, NOTE_C4, NOTE_A3, NOTE_C4, NOTE_D4, NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_C5, NOTE_C5, NOTE_C5,
NOTE_G4, NOTE_FS4, NOTE_E4, NOTE_DS4, NOTE_E4, NOTE_GS3, NOTE_A3, NOTE_C4, NOTE_A3, NOTE_C4, NOTE_D4, NOTE_DS4, NOTE_D4, NOTE_C4,
NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4, NOTE_C4, NOTE_A3, NOTE_G3, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4,
NOTE_C4, NOTE_C4, NOTE_C4, NOTE_C4, NOTE_D4, NOTE_E4, NOTE_C4, NOTE_A3, NOTE_G3
};
/* 节拍 */
static int noteDurations[98] = {
8,4,4,8,4,2,2,
3,3,3,4,4,8,4,8,8,8,4,8,4,3,8,8,3,
3,3,3,4,4,8,4,8,8,8,4,8,4,3,8,8,2,
8,8,8,4,4,8,8,4,8,8,3,8,8,8,4,4,4,8,2,
8,8,8,4,4,8,8,4,8,8,3,3,3,1,
8,4,4,8,4,8,4,8,2,8,4,4,8,4,1,
8,4,4,8,4,8,4,8,2
};具体音调与频率的对照表可参考下图,节拍则需要参照实际乐谱进行修改。
6.3.7 常见问题解答
问:代码上传失败。
答:请检查您是否有将蓝牙模块连接至小车上,若有请取出蓝牙模块后再进行下载。
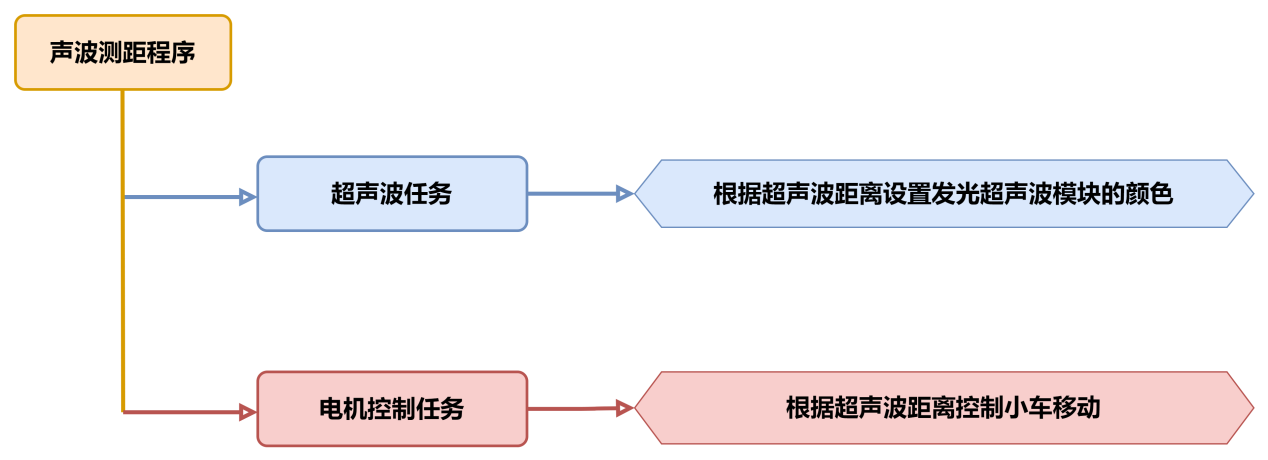
6.4 超声波测距说明
本节通过发光超声波模块检测障碍物距离,同时控制超声波模块灯的颜色变化。
6.4.1 实现流程图

6.4.2 超声波传感器

本节课用的是可发光的超声波测距模块,模块采用 IIC 通信接口,能通过 IIC通信进行读取超声波传感器测量的距离。
传感器测距时模块会自动发送 8 个 40khz 的方波,然后检测是否有信号返回; 如果有信号返回,便输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
具体公式为:测试距离=(高电平时间*声速(340M/S))/2。
6.4.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\超声波测距程序\ultrasonic_test\ultrasonic_test.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.4.4 实现效果
打开小车电源后,小车上的发光超声波模块会根据所测障碍物的距离,改变发光超声波的颜色。
将障碍物正对超声波模块并移动障碍物使其缓慢靠近。
当距离>80mm时,发光超声波模块上RGB灯模式为红色呼吸灯模式;
当80mm>距离>180mm时,发光超声波模块上RGB灯为红色渐变模式;
当180mm>距离>320mm时,发光超声波模块上RGB灯为蓝色渐变模式;
当320mm>距离>500mm时,发光超声波模块上RGB灯为绿色渐变模式;
当距离>500mm时,发光超声波模块上RGB灯为绿色常亮模式;
6.4.5 程序简要分析
- 导入库文件
#include "Ultrasound.h"导入本玩法所需要的控制发光超声波的库文件。
- 定义变量及创建对象
首先定义了滤波法数组的容量,以及滤波数据储存变量,接着创建了一个超声波类对象,用于获取距离数据。
#define FILTER_N 3 ///< 滤波法数组容量
int Filter_Value;
int filter_buf[FILTER_N + 1];
Ultrasound ultrasound; ///< 实例化超声波类- 初始化设置
在setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600。
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}- 主函数
在主函数中循环调用超声波任务函数,用于实现“超声波检测”中的功能。
void loop() {
// put your main code here, to run repeatedly:
ultrasonic_distance();
}- 超声波检测
ultrasonic_distance()函数,它是用于实现测距并改变灯光的颜色。
int ultrasonic_distance(){
uint8_t s;
uint16_t distance = Filter();///< 获得滤波器输出值
Serial.print("Distance: ");///< 获取并且串口打印距离,单位mm
Serial.print(distance);
Serial.println(" mm");- 距离大于0且小于等于80mm时,发光超声波为呼吸灯模式,以0.1s的速度显示红色。
if (distance > 0 && distance <= 80){
ultrasound.Breathing(1, 0, 0, 1, 0, 0);///< 呼吸灯模式,周期0.1s,颜色红色
}- 当距离大于80mm且小于180mm时,发光超声波为红色灯光渐变显示,距离越大则颜色越淡。
else if (distance > 80 && distance <= 180){
s = map(distance,80,180,0,255);
ultrasound.Color((255-s), 0, 0, (255-s), 0, 0);///< 红色渐变
}- 当距离大于180mm且小于320mm时,发光超声波为蓝色灯光渐变显示,距离越大则颜色越蓝。
else if (distance > 180 && distance <= 320){
s = map(distance,180,320,0,255);
ultrasound.Color(0, 0, s, 0, 0, s);///< 蓝色渐变
}- 当距离大于320mm且小于500mm时,发光超声波为绿色灯光渐变显示,距离越大则颜色越绿。
else if (distance > 320 && distance <= 500){
s = map(distance,320,500,0,255);
ultrasound.Color(0, s, 255-s, 0, s, 255-s);///< 绿色渐变
}- 当距离大于500mm时,发光超声波的灯光的颜色固定为绿色。
else if (distance > 500){
ultrasound.Color(0, 255, 0, 0, 255, 0);///< 绿色
}6.4.6 功能延伸
这里以修改RGB彩灯渐变时的颜色为例来进行说明,将距离大于80且小于180mm的超声波颜色,从原来的渐变的红色修改为黄色。具体修改内容可参考下面步骤:
- 找到程序中控制RGB彩灯随距离变化的映射代码。这里是通过
map函数设置颜色RGB元素中的R根据s的变化而变化w,map(distance,80,180,0,255)是将障碍物的距离distance映射到R元素上。
ultrasound.Color((255-s), 0, 0, (255-s), 0, 0);///< 红色渐变- 将原先G元素的值更改为与A元素的值相同,需要注意颜色的颜色元素的范围是0~255。然后重新下载程序。这样当障碍物距离在检测范围内时,RGB灯显示出来的渐变色为黄色。
ultrasound.Color((255-s), 0, 0, (255-s), 0, 0);///< 黄色渐变关于RGB颜色表,可前往链接进行查询:https://www.bchrt.com/tools/rgbcolor/
6.4.7 常见问题解答
问:超声波测出的距离有时准确,有时不准确。
答:请使用光滑平整的物品进行测距,同时应避免长时间近距离探测障碍物。
6.5 超声波跟随说明
本节通过发光超声波模块检测障碍物距离,同时操控小车进行前后移动。
6.5.1 实现流程图
6.5.2 超声波传感器
本节课用的是可发光的超声波测距模块,模块采用 IIC 通信接口,能通过 IIC通信进行读取超声波传感器测量的距离。
传感器测距时模块会自动发送 8 个 40khz 的方波,然后检测是否有信号返回; 如果有信号返回,便输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
具体公式为:测试距离=(高电平时间*声速(340M/S))/2。
6.5.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\超声波跟随程序\ultrasonic_following\ultrasonic_following.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.5.4 实现效果
打开小车电源,小车会根据超声波所测障碍物的距离,改变发光超声波的颜色,并控制小车进行前进或者后退。
将障碍物正对超声波模块并移动障碍物使其缓慢靠近。
- 超声波灯光颜色变化效果:
(1)当距离>80mm时,发光超声波模块上RGB灯模式为红色呼吸灯模式;
(2)当80mm>距离>180mm时,发光超声波模块上RGB灯为红色渐变模式;
(3)当180mm>距离>320mm时,发光超声波模块上RGB灯为蓝色渐变模式;
(4)当320mm>距离>500mm时,发光超声波模块上RGB灯为绿色渐变模式;
(5)当距离>500mm时,发光超声波模块上RGB灯为绿色常亮模式;
- 小车控制效果:
(1)当距离<200mm时,控制小车向后移动;
(2)当300mm>距离>=200mm时,控制小车停止移动;
(3)当700mm>距离>=300mm时,控制小车向前移动;
(4)当700mm<距离时,控制小车停止移动;
6.5.5 程序简要分析
- 导入库文件
#include "Ultrasound.h"导入本玩法所需要的控制发光超声波的库文件。
- 定义变量及创建对象
首先创建了一个超声波类,用于获取距离数据,接着创建了pwm_min变量,用于存储pwm的最小映射值,然后创建了一个数组对数字电机引脚进行了定义,最后创建了dis变量,用于储存超声波距离的值。
Ultrasound ultrasound; //实例化超声波类
const static uint8_t pwm_min = 50;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};
uint16_t dis;- 初始化设置
在setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着调用了Motor_Init()函数绑定电机并对电机进行初始化。
void setup() {
Serial.begin(9600);
Motor_Init();
}- 主函数
在主函数中循环调用超声波任务函数,用于获取距离数据以及设置发光超声波的颜色,通过对所测得的数据,进行判断后再对小车进行控制。
void loop() {
ultrasonic_distance();
dis = ultrasonic_distance();
if(dis >=700) Velocity_Controller( 0, 0, 0, 0);
if(dis >= 300 && dis < 700) Velocity_Controller( 0,50, 0, 0);
if(dis >= 200 && dis < 300) Velocity_Controller( 0, 0, 0, 0);
if(dis < 200) Velocity_Controller( 180, 50, 0, 0);
}- 超声波检测
- 调用
loop主函数中的超声波任务函数ultrasonic_distance(),它是用于实现测距并改变灯光的颜色。
uint16_t ultrasonic_distance(){
uint8_t s;
uint16_t distance = Filter(); // 获得滤波器输出值
Serial.print("Distance: ");Serial.print(distance);Serial.println(" mm"); //获取并且串口打印距离,单位mm- 距离大于0且小于等于80mm时,发光超声波为呼吸灯模式,以0.1s的速度显示红色。
if (distance > 0 && distance <= 80){
ultrasound.Breathing(1, 0, 0, 1, 0, 0); //呼吸灯模式,周期0.1s,颜色红色
}- 当距离大于80mm且小于180mm时,发光超声波为红色灯光渐变显示,距离越大则颜色越淡。
else if (distance > 80 && distance <= 180){
s = map(distance,80,180,0,255);
ultrasound.Color((255-s), 0, 0, (255-s), 0, 0); //红色渐变
}- 当距离大于180mm且小于320mm时,发光超声波为蓝 色灯光渐变显示,距离越大则颜色越蓝。
else if (distance > 180 && distance <= 320){
s = map(distance,180,320,0,255);
ultrasound.Color(0, 0, s, 0, 0, s); //蓝色渐变
}- 当距离大于320mm且小于500mm时,发光超声波为绿色灯光渐变显示,距离越大则颜色越绿。
else if (distance > 320 && distance <= 500){
s = map(distance,320,500,0,255);
ultrasound.Color(0, s, 255-s, 0, s, 255-s); //绿色渐变
}- 当距离大于500mm时,发光超声波的灯光的颜色固定为绿色。
else if (distance > 500){
ultrasound.Color(0, 255, 0, 0, 255, 0); //绿色
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot,bool drift) {
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
if (drift) {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed * 2;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed * 2;
} else {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
}
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3) {
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3};
bool direction[4] = { 1, 0, 0, 1};///< 前进 左1 右0
for(uint8_t i; i < 4; ++i) {
if(motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if(motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = map(abs(motors[i]), 0, 100, pwm_min, 255);
digitalWrite(motordirectionPin[i], direction[i]);
analogWrite(motorpwmPin[i], pwm_set[i]);
}
}6.5.6 功能延伸
这里以修改超声波跟随后退的阈值为例,将原先的200mm修改为100mm。
- 找到代码中识别到距离小于200mm时,控制小车进行后退的代码,将原先的200mm修改为100mm。
void loop() {
ultrasonic_distance();
dis = ultrasonic_distance();
if(dis >=700) Velocity_Controller( 0, 0, 0, 0);
if(dis >= 300 && dis < 700) Velocity_Controller( 0,50, 0, 0);
if(dis >= 200 && dis < 300) Velocity_Controller( 0, 0, 0, 0);
if(dis < 100) Velocity_Controller( 180, 50, 0, 0);
}- 修改完成后,参照“6.5.3程序下载”重新下载程序即可。
6.5.7 常见问题解答
问:超声波测出的距离有时准确,有时不准确。
答:请使用光滑平整的物品进行测距,同时应避免长时间近距离探测障碍物。
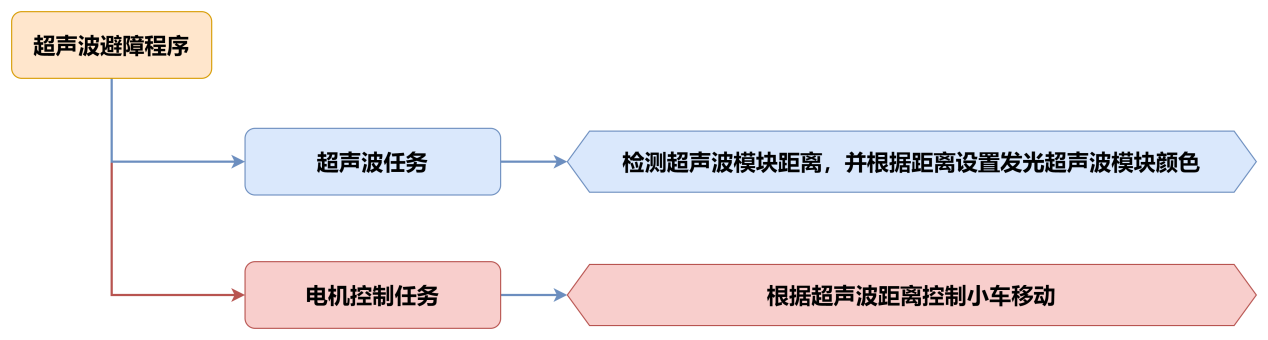
6.6 超声波避障说明
本节通过发光超声波模块检测障碍物距离,同时操控小车向右转向进行避障。
6.6.1 实现流程图
6.6.2 超声波传感器
本节课用的是可发光的超声波测距模块,模块采用 IIC 通信接口,能通过 IIC通信进行读取超声波传感器测量的距离。
传感器测距时模块会自动发送 8 个 40khz 的方波,然后检测是否有信号返回; 如果有信号返回,便输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
具体公式为:测试距离=(高电平时间*声速(340M/S))/2。
6.6.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\超声波避障程序\ultrasonic_avoid\ultrasonic_avoid.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.6.4 实现效果
打开小车电源,检测到板载按键被按下后,小车会以100的速度向前移动,同时小车会根据超声波所测障碍物的距离,改变发光超声波的颜色,并控制小车进行转向。
将障碍物正对超声波模块并移动障碍物使其缓慢靠近。
- 超声波灯光颜色变化效果:
(1)当距离>80mm时,发光超声波模块上RGB灯模式为红色呼吸灯模式;
(2)当80mm>距离>180mm时,发光超声波模块上RGB灯为红色渐变模式;
(3)当180mm>距离>320mm时,发光超声波模块上RGB灯为蓝色渐变模式;
(4)当320mm>距离>500mm时,发光超声波模块上RGB灯为绿色渐变模式;
(5)当距离>500mm时,发光超声波模块上RGB灯为绿色常亮模式;
- 小车控制效果:
(1)当距离>=300mm时,控制小车向前移动;
(2)当距离<300mm时,控制小车右进行转向;
6.6.5 程序简要分析
- 导入库文件
#include "Ultrasound.h"导入本玩法所需要的控制发光超声波的库文件。
- 定义变量及创建对象
首先创建了一个超声波类,用于获取距离数据,接着创建了pwm_min变量,用于存储pwm的最小映射值,然后创建了一个数组对数字电机引脚进行了定义,最后创建了dis变量,用于储存超声波距离的值。
Ultrasound ultrasound; ///< 实例化超声波类
const static uint8_t keyPin = 3;
const static uint8_t pwm_min = 50;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 初始化设置
在setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着调用了Motor_Init()函数绑定电机并对电机进行初始化。
void setup() {
Serial.begin(9600);
pinMode(keyPin, INPUT);
Motor_Init();
}- 主函数
在主函数中按键被按下后,进入到超声波避障玩法功能中,循环调用超声波任务函数,用于获取距离数据以及设置发光超声波的颜色,通过对所测得的数据,进行判断后再对小车进行控制。
void loop() {
keyState = analogRead(keyPin);
if(!keyState) taskStart = 1;
if(taskStart) {
ultrasonic_distance();
dis = ultrasonic_distance();
Velocity_Controller( 0, 100, 0, 0);
while(dis < 300) {
dis = ultrasonic_distance();
Velocity_Controller( 0, 0, -100, 0);
}
}
}- 超声波检测
- 调用loop主函数中的超声波任务函数
ultrasonic_distance(),它是用于实现测距并改变灯光的颜色。
uint16_t ultrasonic_distance(){
uint8_t s;
uint16_t distance = Filter(); ///< 获得滤波器输出值
Serial.print("Distance: ");Serial.print(distance);Serial.println(" mm"); ///< 获取并且串口打印距离,单位mm- 距离大于0且小于等于80mm时,发光超声波为呼吸灯模式,以0.1s的速度显示红色。
if (distance > 0 && distance <= 80){
ultrasound.Breathing(1, 0, 0, 1, 0, 0); ///< 呼吸灯模式,周期0.1s,颜色红色
}- 当距离大于80mm且小于180mm时,发光超声波为红色灯光渐变显示,距离越大则颜色越淡。
else if (distance > 80 && distance <= 180){
s = map(distance,80,180,0,255);
ultrasound.Color((255-s), 0, 0, (255-s), 0, 0); ///< 红色渐变
}- 当距离大于180mm且小于320mm时,发光超声波为蓝色灯光渐变显示,距离越大则颜色越蓝。
else if (distance > 180 && distance <= 320){
s = map(distance,180,320,0,255);
ultrasound.Color(0, 0, s, 0, 0, s); ///< 蓝色渐变
}- 当距离大于320mm且小于500mm时,发光超声波为绿色灯光渐变显示,距离越大则颜色越绿。
else if (distance > 320 && distance <= 500){
s = map(distance,320,500,0,255);
ultrasound.Color(0, s, 255-s, 0, s, 255-s); ///< 绿色渐变
}- 当距离大于500mm时,发光超声波的灯光的颜色固定为绿色。
else if (distance > 500){
ultrasound.Color(0, 255, 0, 0, 255, 0); ///< 绿色
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot,bool drift) {
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
if (drift) {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed * 2;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed * 2;
} else {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
}
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3) {
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3};
bool direction[4] = { 1, 0, 0, 1};///< 前进 左1 右0
for(uint8_t i; i < 4; ++i) {
if(motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if(motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = map(abs(motors[i]), 0, 100, pwm_min, 255);
digitalWrite(motordirectionPin[i], direction[i]);
analogWrite(motorpwmPin[i], pwm_set[i]);
}
}6.6.6 功能延伸
这里以修改小车转向的方向为例来进行说明,将遇到障碍物向右转,修改为向左转。具体修改内容可参考下面步骤:
- 找到程序中控制小车转向的代码。这里是通过
Velocity_Controller()函数来控制小车以100的速度顺时针向右旋转(小于0为顺时针旋转,大于0则为逆时针旋转)。
Velocity_Controller( 0, 0, -100, 0);- 将原先-100的值更改为100,此时小车就会以100的速度逆时针旋向左旋转了。
Velocity_Controller( 0, 0, 100, 0);6.6.7 常见问题解答
问:代码上传后超声波测出的距离一直为0。
答:请检查您是否将4pin线连接至正确的IIC接口。
问:超声波测出的距离有时准确,有时不准确。
答:请使用光滑平整的物品进行测距,同时应避免长时间近距离探测障碍物。
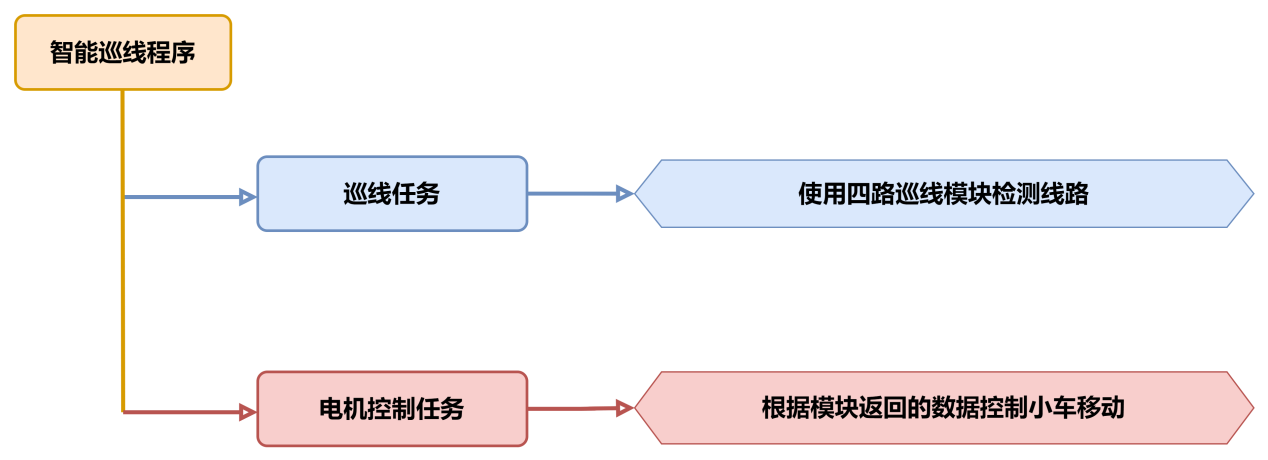
6.7 智能巡线说明
本节通过四路巡线传感器识别黑色的线路,再控制小车跟随线路移动。
6.7.1 实现流程图
6.7.2 四路巡线传感器
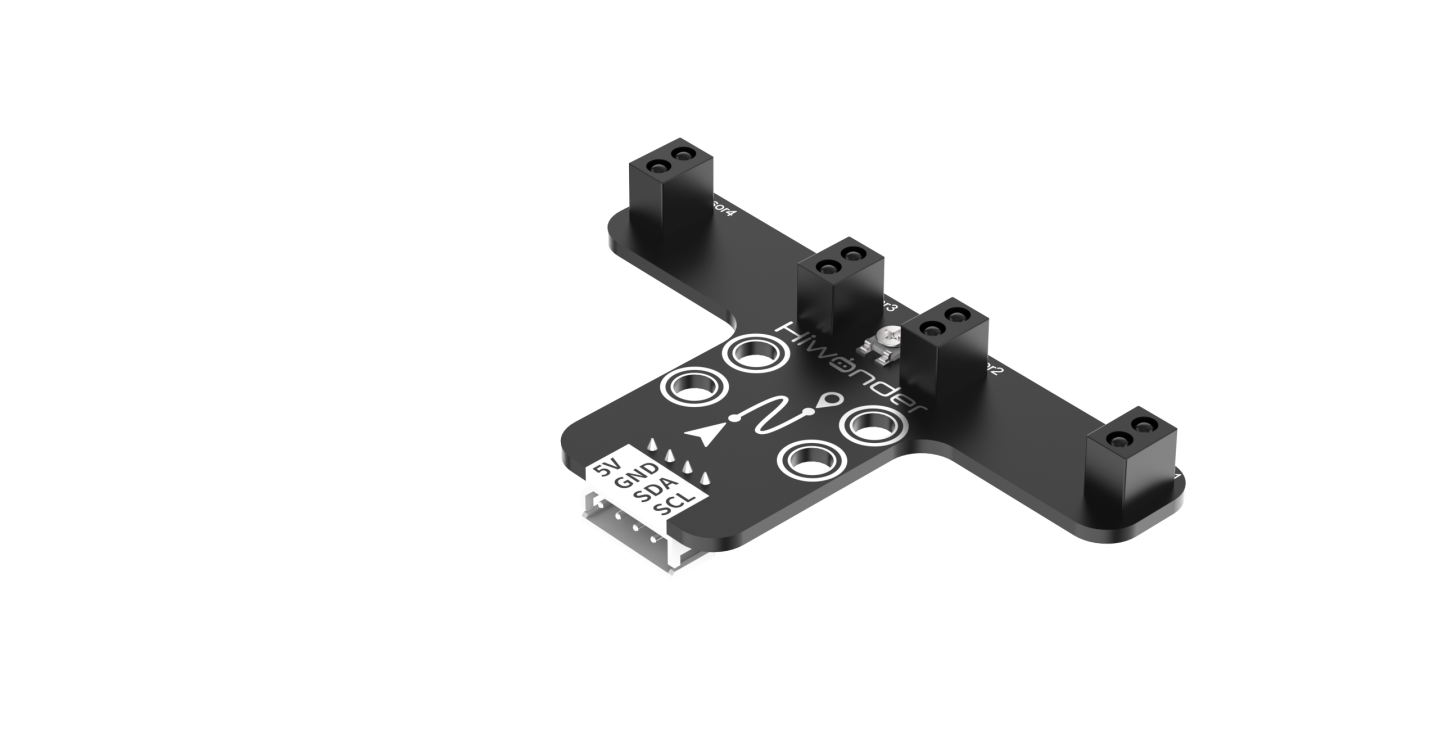
本节课用的是四路巡线模块,模块采用 IIC 通信接口,能通过 IIC通信进行读取传感器探头上的数据。
传感器有四个探头,每个探头都有一个红外发射器和一个红外接收器,白色对红外反射强,黑色对红外反射弱,由此可以判断是否识别到路线。
6.7.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\智能巡线程序\tracking_test\tracking_test.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.7.4 实现效果
先将小车放置在黑色线路上,打开小车电源,检测到板载按键被按下后,小车会进入到巡线程序中。当小车识别到黑色线时,会跟随黑线进行移动,若未识别到黑线则会进行后退,直到重新识别到黑线。
NOTE
在开始巡线程序前,请先将小车放置在黑线上,否则小车会一直后退。
6.7.5 程序简要分析
- 导入库文件
#include <Wire.h>
#include "FastLED.h"导入本玩法所需要的IIC通信、RGB灯库文件。
- 定义变量及创建对象
- 首先定义了四路巡线传感器的IIC通讯地址,接着定义了板载RGB灯引脚、板载按键引脚、以及电机的引脚。
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */
const static uint8_t ledPin = 2;
const static uint8_t keyPin = 3;
const static uint8_t pwm_min = 50;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11 };
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13 };
const static uint8_t TRACKING = 4;- 创建了RGB灯控制对象,modestate变量用于设置小车的执行模式,本程序用的是巡线模式。
static CRGB rgbs[1];
static uint8_t modestate = TRACKING;- 初始化设置
- 在
setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着将按键引脚配置为输入模式,使用FastLED库初始化扩展板上的RGB灯,并将其连接到ledPin引脚。通过Rgb_Show(255,255,255)设置RGB灯的颜色为白色。
void setup() {
/* 配置通信 */
Serial.begin(9600);
pinMode(keyPin, INPUT);
FastLED.addLeds<WS2812, ledPin, GRB>(rgbs, 1);
Rgb_Show(255, 255, 255);
Wire.begin();
Motor_Init();
}- 通过
Wire.begin()初始化IIC通讯,调用Motor_Init()绑定并初始化电机引脚。
Wire.begin();
Motor_Init();- 主函数
在主函数中检测到按键被按下后,将循环调用Sensor_Receive()函数获取四路巡线传感器的值,进行判断后再对小车进行控制。接着调用Task_Dispatcher()函数执行巡线追踪任务。
void loop() {
keyState = analogRead(keyPin);
if (!keyState) taskStart = 1;
if (taskStart) {
Sensor_Receive();
Task_Dispatcher();
}
}- 获取传感器数据
通过WireReadDataByte()函数向传感器获取当前的路线数据,rec_data数组第0-3位对应的是四路巡线传感器上Sensor1-4探头的值。若获取到的值为0表示未识别到黑线,获取到的值为1则表示识别到黑线,最后将值保存在数组rec_data中。
/* 获取传感器数据 */
void Sensor_Receive(void) {
WireReadDataByte(1, data);
rec_data[0] = data & 0x01;
rec_data[1] = (data >> 1) & 0x01;
rec_data[2] = (data >> 2) & 0x01;
rec_data[3] = (data >> 3) & 0x01;
}- 任务调度函数
在任务调度函数中,将会执行设置好的对应任务,通过modestate变量的值来执行相应的任务。
/* 任务调度 */
void Task_Dispatcher() {
switch (modestate) {
case TRACKING:
Tracking_Line_Task();
break;
}
}- 巡线追踪任务
- 首先调用
Rgb_Show(255,0,0)函数将板载RGB设置为红色,对接收到的传感器数据进行判断,若Sensor2、Sensor3探头同时识别到黑线,则控制小车向前直行。
void Tracking_Line_Task(void) {
Rgb_Show(255, 0, 0);
if (rec_data[1] == 1 && rec_data[2] == 1) {
Velocity_Controller(0, 80, 0, 0);
}- 如果Sensor2探头识别到黑线而Sensor3探头未识别到黑线,此时将控制小车向左偏65°前进。若Sensor3识别到黑线,而Sensor2未识别到,则向右偏65°进行移动。
if (rec_data[1] == 1 && rec_data[2] == 0) {
Velocity_Controller(0, 80, 65, 0);
}
if (rec_data[1] == 0 && rec_data[2] == 1) {
Velocity_Controller(0, 80, -65, 0);
}- 当Sensor2和Sensor3都未识别到黑线时,控制小车进行后退。
while (rec_data[1] == 0 && rec_data[2] == 0) {
Sensor_Receive();
Velocity_Controller(0, 0, 0, 0);
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
void Velocity_Controller(uint16_t angle, uint8_t velocity, int8_t rot, bool drift) {
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1; ///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
if (drift) {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed * 2;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed * 2;
} else {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
}
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3) {
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 }; ///< 前进 左1 右0
for (uint8_t i; i < 4; ++i) {
if (motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if (motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = map(abs(motors[i]), 0, 100, pwm_min, 255);
digitalWrite(motordirectionPin[i], direction[i]);
analogWrite(motorpwmPin[i], pwm_set[i]);
}
}6.7.6 功能延伸
如果巡线传感器识别不到黑色线路,那么就需要对巡线传感器的电位器进行调节,巡线传感器上的旋钮顺时针扭动会增加识别的距离,逆时针扭动则会缩短识别的距离。
需要将巡线传感器调节至识别到黑线,传感器上的LED灯会熄灭,识别不到黑线会亮起为止。
这里我们将旋钮逆时针扭动,缩短识别的距离,调节好之后就可以正常进行巡线了。
6.7.7 常见问题解答
问1:代码上传后小车一直进行后退。
答:请在运行代码前先将小车放置在黑线上方。
问2:四路巡线传感器的识别不准确。
答:请将四路巡线传感器上的电位器调整至合适位置。
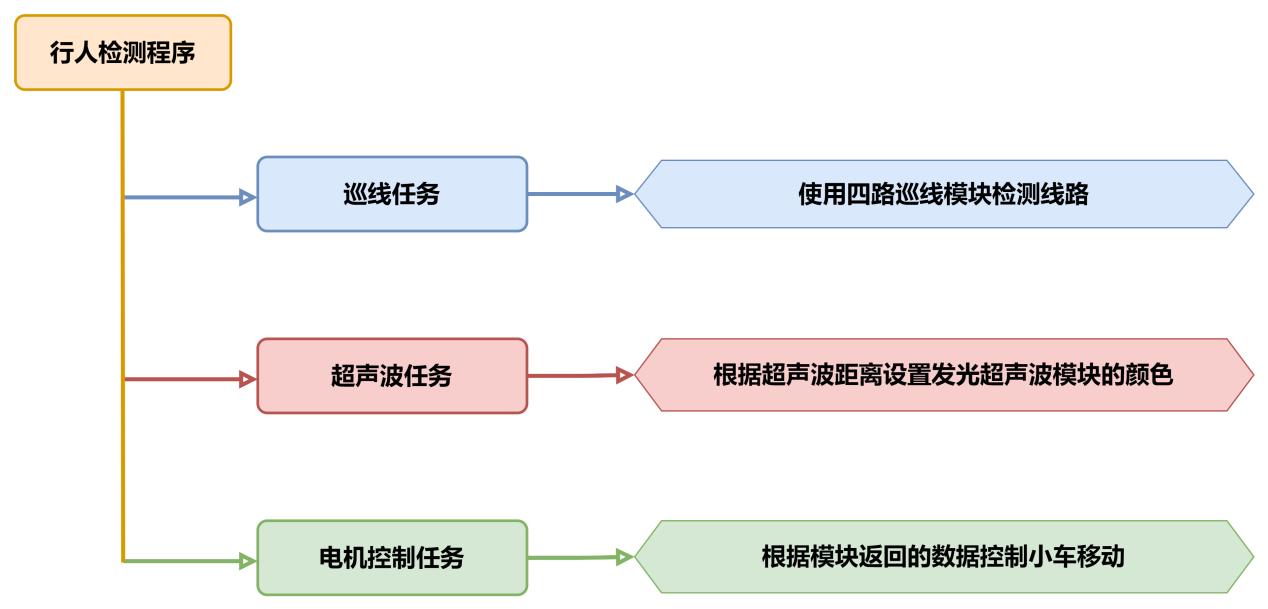
6.8 行人检测说明
本节通过四路巡线传感器识别黑色的线路,控制小车跟随线路移动,若在巡线中超声波检测到有行人在线路上,则控制小车进行规避。
6.8.1 实现流程图
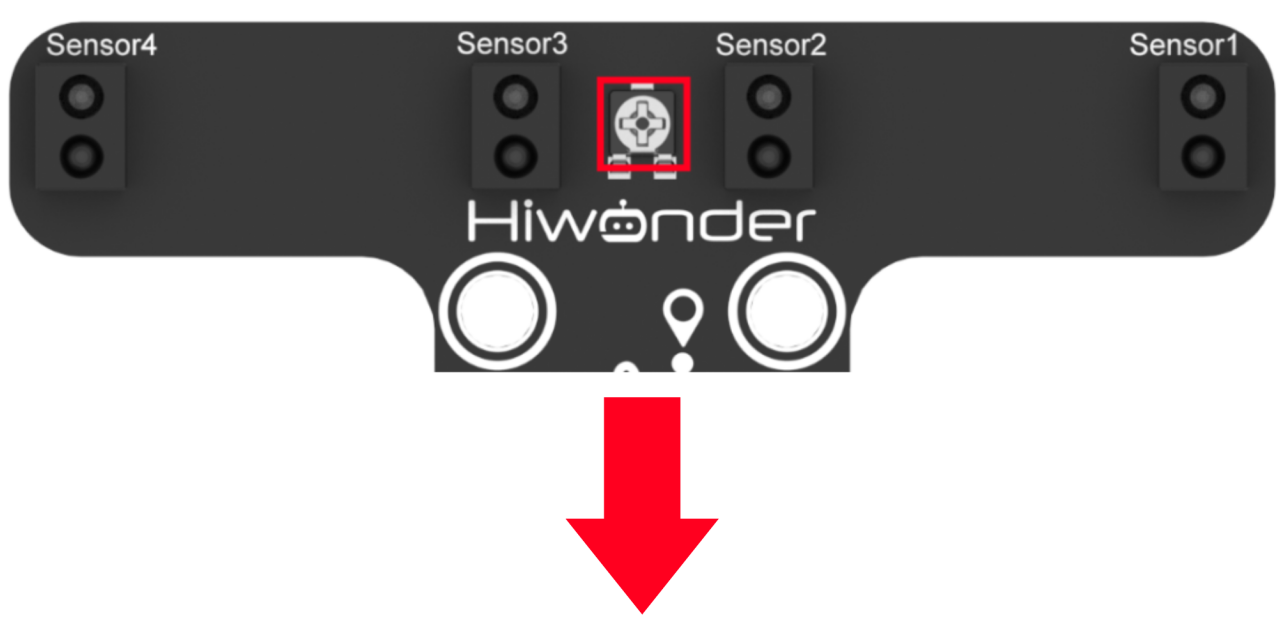
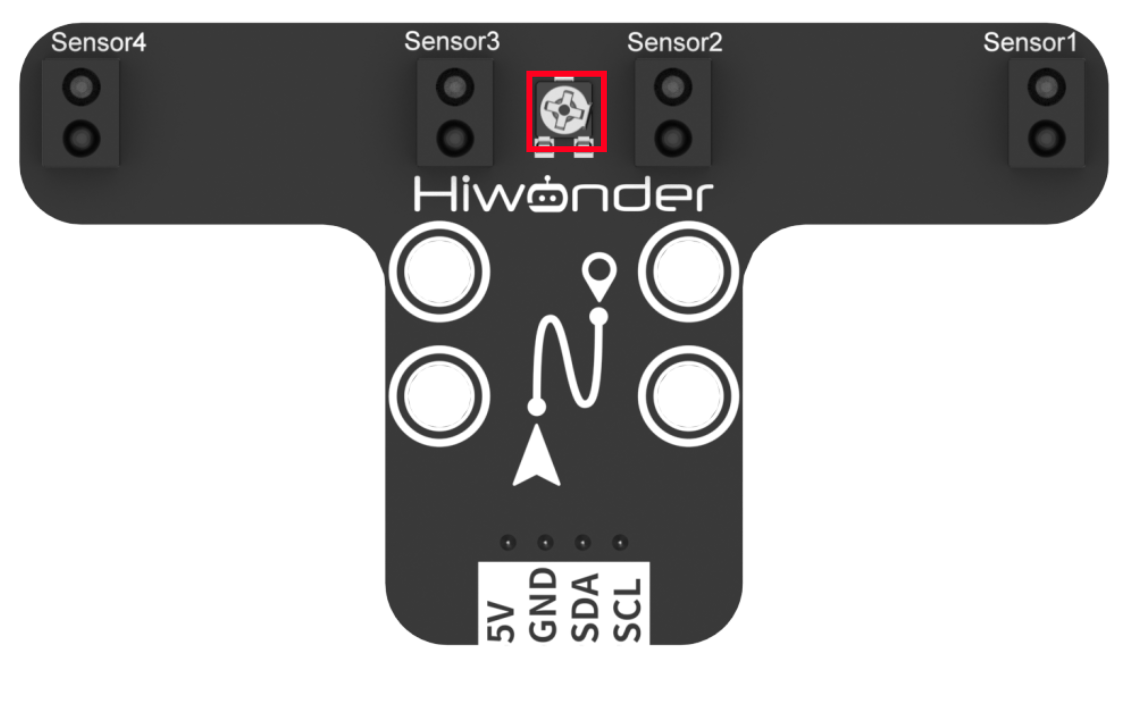
6.8.2 模块介绍
四路巡线模块
四路巡线模块采用 IIC 通信接口,能通过 IIC通信进行读取传感器探头上的数据;
该模块有四个探头,每个探头都有一个红外发射器和一个红外接收器,白色对红外反射强,黑色对红外反射弱,由此可以判断是否识别到路线。
- 超声波模块
超声波模块采用 IIC 通信接口,能通过 IIC通信进行读取超声波传感器测量的距离。 同时超声波探头位置集成两个 RGB 灯,不仅能调节灯光亮度,还可以通过对红(R)、 绿(G)、蓝(B)三个颜色通道的变化以及它们相互之间的叠加,实现多彩颜色变化。
测距时模块会自动发送 8 个 40khz 的方波,然后检测是否有信号返回;如果有信号返回,便输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
6.8.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\行人检测程序\tracking_avoid\tracking_avoid.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.8.4 实现效果
先将小车放置在黑色线路上,按键被按下后,小车会进入到巡线程序中。
当小车识别到黑色线时,会跟随黑线进行移动,若未识别到黑线则会进行后退,直到重新识别到黑线。在巡线的过程中如果超声波检测到前方有行人,则控制小车停止运行。
NOTE
在开始巡线程序前,请先将小车放置在黑线上,否则小车会一直后退。
6.8.5 程序简要分析
- 导入库文件
#include <Wire.h>
#include "Ultrasound.h"
#include "FastLED.h"导入本玩法所需要的IIC通信、RGB灯、发光超声波库文件。
- 定义变量及创建对象
- 首先定义了四路巡线传感器的IIC通讯地址,以及滤波算法的容量大小,接着创建了一个超声波对象。
#define LINE_FOLLOWER_I2C_ADDR 0x78/* 寻线传感器的iic地址 */
#define FILTER_N 3 //递推平均滤波法
Ultrasound ultrasound; //实例化超声波类- 定义了板载RGB灯引脚、板载按键引脚、以及电机的引脚,TRACKING变量用于表示巡线模式,AVOID是检测到行人所需进入的模式。
const static uint8_t ledPin = 2;
const static uint8_t keyPin = 3;
const static uint8_t buzzerPin = 3;
const static uint8_t pwm_min = 50;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};
const static uint8_t TRACKING = 4;
const static uint8_t AVOID = 6;- 创建了RGB灯控制对象,
modestate变量用于设置小车的执行模式,默认为巡线模式。
static CRGB rgbs[1];
static uint8_t modestate = TRACKING;- 初始化设置
- 在
setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着将按键引脚配置为输入模式,使用FastLED库初始化扩展板上的RGB灯,并将其连接到ledPin引脚。通过Rgb_Show(255,255,255)设置RGB灯的颜色为白色。
void setup(){
/* 配置通信 */
Serial.begin(9600);
pinMode(keyPin, INPUT);
FastLED.addLeds<WS2812, ledPin, GRB>(rgbs, 1);
Rgb_Show(255,255,255);
Wire.begin();
Motor_Init();
}- 通过
Wire.begin()初始化IIC通讯,调用Motor_Init()绑定并初始化电机引脚。
Wire.begin();
Motor_Init();- 主函数
在主函数中检测到按键被按下后,将循环调用Sensor_Receive()函数获取四路巡线传感器的值,用于检测黑线。再通过ultrasonic_distance()函数获取超声波的距离,用于检测是否有识别到行人。最后进行判断对小车进行控制。接着调用Task_Dispatcher()函数执行相应任务。
void loop(){
keyState = analogRead(keyPin);
if(!keyState) taskStart = 1;
if(taskStart) {
Sensor_Receive();
ultrasonic_distance();
dis = ultrasonic_distance();
Task_Dispatcher();
}- 获取传感器数据
通过WireReadDataByte()函数向传感器获取当前的路线数据,rec_data数组第0-3位对应的是四路巡线传感器上Sensor1-4探头的值。若获取到的值为0表示未识别到黑线,获取到的值为1则表示识别到黑线,最后将值保存在数组rec_data中。
void Sensor_Receive(void){
WireReadDataByte(1,data);
rec_data[0] = data & 0x01;
rec_data[1] = (data>>1) & 0x01;
rec_data[2] = (data>>2) & 0x01;
rec_data[3] = (data>>3) & 0x01;
}- 任务调度函数
在任务调度函数中,将会执行设置好的对应任务,通过modestate变量的值来执行相应的任务,默认处在巡线模式中。若超声波检测到行人则进入到行人检测任务中,直到未识别到行人才重新进入巡线模式。
/* 任务调度 */
void Task_Dispatcher(){
switch(modestate){
case TRACKING:
Tracking_Line_Task();
break;
case AVOID:
Avoid_Task();
break;
}
}- 巡线追踪任务
- 首先调用
Rgb_Show(255,0,0)函数将板载RGB设置为红色,对接收到的传感器数据进行判断,若Sensor2、Sensor3探头同时识别到黑线,则控制小车向前直行。
void Tracking_Line_Task(void){
Rgb_Show(255,0,0);
if(rec_data[1] == 1 && rec_data[2] == 1){
Velocity_Controller(0, 80, 0, 0);
}- 如果Sensor2探头识别到黑线而Sensor3探头未识别到黑线,此时将控制小车向左偏65°前进。若Sensor3识别到黑线,而Sensor2未识别到,则向右偏65°进行移动。
if(rec_data[1] == 1 && rec_data[2] == 0){
Velocity_Controller(0, 80, 65, 0);
}
if(rec_data[1] == 0 && rec_data[2] == 1){
Velocity_Controller(0, 80, -65, 0);
}- 当Sensor2和Sensor3都未识别到黑线时,控制小车进行后退。
while(rec_data[1] == 0 && rec_data[2] == 0){
Sensor_Receive();
Velocity_Controller(180, 80, 0, 0);
}- 行人检测任务
当检测到行人后,首先通过Velocity_Controller(0, 0, 0, 0)函数控制小车停止运行,调用Rgb_Show(0,255,0)使扩展板上的RGB灯亮绿色,再通过tone(buzzerPin, 1000)使蜂鸣器以1000Hz的频率进行鸣响。等待行人离开后,切换回巡线追踪模式,同时关闭蜂鸣器鸣响。
/* 行人检测任务 */
void Avoid_Task(void){
Velocity_Controller(0, 0, 0, 0);
Rgb_Show(0,255,0);
tone(buzzerPin, 1000);
if(dis > 80) {
modestate = TRACKING;
noTone(buzzerPin);
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot,bool drift) {
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
if (drift) {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed * 2;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed * 2;
} else {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
}
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3) {
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3};
bool direction[4] = { 1, 0, 0, 1};///< 前进 左1 右0
for(uint8_t i; i < 4; ++i) {
if(motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if(motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = map(abs(motors[i]), 0, 100, pwm_min, 255);
digitalWrite(motordirectionPin[i], direction[i]);
analogWrite(motorpwmPin[i], pwm_set[i]);
}
}6.8.6 常见问题解答
问1:代码上传后小车一直进行后退。
答:请在运行代码前先将小车放置在黑线上方。
问2:四路巡线传感器的识别不准确。
答:请将四路巡线传感器上的电位器调整至合适位置。
6.9 十字路口判断说明
本节通过四路巡线传感器识别黑色的线路,再控制小车跟随线路移动,若遇到十字路口则控制小车停止运行。
6.9.1 实现流程图
6.9.2 四路巡线传感器
本节课用的是四路巡线模块,模块采用 IIC 通信接口,能通过 IIC通信进行读取传感器探头上的数据。
传感器有四个探头,每个探头都有一个红外发射器和一个红外接收器,白色对红外反射强,黑色对红外反射弱,由此可以判断是否识别到路线。
6.9.3 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\十字路口判断程序\tracking_crossroads\tracking_crossroads.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。
点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.9.4 实现效果
先将小车放置在黑色线路上,打开小车电源,检测到板载按键被按下后,小车会进入到巡线程序中。当小车识别到黑色线时,会跟随黑线进行移动,若未识别到黑线则会进行后退,直到重新识别到黑线。
NOTE
在开始巡线程序前,请先将小车放置在黑线上,否则小车会一直后退。
6.9.5 程序简要分析
- 导入库文件
#include <Wire.h>
#include "FastLED.h"导入本玩法所需要的IIC通信、RGB灯库文件。
- 定义变量及创建对象
- 首先定义了四路巡线传感器的IIC通讯地址,接着定义了板载RGB灯引脚、板载按键引脚、以及电机的引脚。
#define LINE_FOLLOWER_I2C_ADDR 0x78 /* 巡线传感器的iic地址 */
const static uint8_t ledPin = 2;
const static uint8_t keyPin = 3;
const static uint8_t pwm_min = 50;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11 };
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13 };
const static uint8_t TRACKING = 4;
const static uint8_t INTERSECTION_DETECTION = 5;- 创建了RGB灯控制对象,modestate变量用于设置小车的执行模式,默认为巡线模式。
static CRGB rgbs[1];
static uint8_t modestate = TRACKING;- 初始化设置
- 在
setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着将按键引脚配置为输入模式,使用FastLED库初始化扩展板上的RGB灯,并将其连接到ledPin引脚。通过Rgb_Show(255,255,255)设置RGB灯的颜色为白色。
void setup() {
/* 配置通信 */
Serial.begin(9600);
pinMode(keyPin, INPUT);
FastLED.addLeds<WS2812, ledPin, GRB>(rgbs, 1);
Rgb_Show(255, 255, 255);
Wire.begin();
Motor_Init();
}- 通过
Wire.begin()初始化IIC通讯,调用Motor_Init()绑定并初始化电机引脚。
Wire.begin();
Motor_Init();- 主函数
在主函数中检测到按键被按下后,将循环调用Sensor_Receive()函数获取四路巡线传感器的值,进行判断后再对小车进行控制。接着调用Task_Dispatcher()函数执行任务调度执行相应的模式。
void loop() {
keyState = analogRead(keyPin);
if (!keyState) taskStart = 1;
if (taskStart) {
Sensor_Receive();
Task_Dispatcher();
}
}- 获取传感器数据
通过WireReadDataByte()函数向传感器获取当前的路线数据,rec_data数组第0-3位对应的是四路巡线传感器上Sensor1-4探头的值。若获取到的值为0表示未识别到黑线,获取到的值为1则表示识别到黑线,最后将值保存在数组rec_data中。
/* 获取传感器数据 */
void Sensor_Receive(void) {
WireReadDataByte(1, data);
rec_data[0] = data & 0x01;
rec_data[1] = (data >> 1) & 0x01;
rec_data[2] = (data >> 2) & 0x01;
rec_data[3] = (data >> 3) & 0x01;
}- 任务调度函数
在任务调度函数中,将会执行设置好的对应任务,通过modestate变量的值来执行相应的任务,默认处在巡线模式中。若识别到十字路口则进入到十字路口检测任务中。
/* 任务调度 */
void Task_Dispatcher() {
switch (modestate) {
case TRACKING:
Tracking_Line_Task();
break;
case INTERSECTION_DETECTION:
Intersection_Detection_Task();
break;
}
}- 巡线追踪任务
- 首先调用
Rgb_Show(255,0,0)函数将板载RGB设置为红色,对接收到的传感器数据进行判断,若Sensor2、Sensor3探头同时识别到黑线,则控制小车向前直行。
void Tracking_Line_Task(void) {
Rgb_Show(255, 0, 0);
if (rec_data[1] == 1 && rec_data[2] == 1) {
Velocity_Controller(0, 80, 0, 0);
}- 如果Sensor2探头识别到黑线而Sensor3探头未识别到黑线,此时将控制小车向左偏65°前进。若Sensor3识别到黑线,而Sensor2未识别到,则向右偏65°进行移动。
if (rec_data[1] == 1 && rec_data[2] == 0) {
Velocity_Controller(0, 80, 65, 0);
}
if (rec_data[1] == 0 && rec_data[2] == 1) {
Velocity_Controller(0, 80, -65, 0);
}- 当Sensor2和Sensor3都未识别到黑线时,控制小车进行后退。
while (rec_data[1] == 0 && rec_data[2] == 0) {
Sensor_Receive();
Velocity_Controller(0, 0, 0, 0);
}- 若Sensor0和Sensor3都识别到到黑线时,则表示当前处于十字路口,进入到十字路口检测任务。
if(rec_data[0] == 1 && rec_data[3] == 1){ //0没识别到黑线 1识别到黑线
modestate = INTERSECTION_DETECTION;
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity, int8_t rot, bool drift) {
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1; ///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
if (drift) {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed * 2;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed * 2;
} else {
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
}
Motors_Set(velocity_0, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3) {
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3 };
bool direction[4] = { 1, 0, 0, 1 }; ///< 前进 左1 右0
for (uint8_t i; i < 4; ++i) {
if (motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if (motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = map(abs(motors[i]), 0, 100, pwm_min, 255);
digitalWrite(motordirectionPin[i], direction[i]);
analogWrite(motorpwmPin[i], pwm_set[i]);
}
}6.9.6 功能延伸
这里以修改检测到十字路口后,控制小车向左转为例。
- 找到代码中的十字路口检测任务函数,将原来的识别到十字路口停止2秒钟,修改为向左转0.5秒。
Velocity_Controller(0, 0, 65, 0);
delay(500);- 修改完成后,参照“6.9.3 程序下载”重新下载程序即可。
6.9.7 常见问题解答
问1:代码上传后小车一直进行后退。
答:请在运行代码前先将小车放置在黑线上方。
问2:四路巡线传感器的识别不准确。
答:请将四路巡线传感器上的电位器调整至合适位置。
6.10 APP控制说明
本节主要讲解miniAuto的控制程序功能实现,通过对手机APP的功能玩法进行分析,让用户加深对miniAuto底层实现的了解。
6.10.1 实现流程图
6.10.2 程序下载
NOTE
下载程序前需先将蓝牙模块取下,否则会因串口冲突导致程序下载失败。
接入Type-B下载线时请将电池盒开关拨到“OFF”挡,避免下载线误碰到扩展板的电源引脚,造成短路。
找到并打开本节同目录下的“02 程序文件\APP控制程序\app_control\app_control.ino”程序文件。

将Arduino通过UNO数据线(Type-B)连接至电脑。
点击“选择开发板”选项,软件会自动检测当前Arduino串口,点击进行连接。
点击
,将程序下载至Arduino中,等待下载完成即可。
6.10.3 程序运行效果
该程序玩法的功能,可前往“4.APP遥控\4.2 APP使用说明”下查看。
6.10.4 程序简要分析
- 导入库文件
导入本玩法所需的RGB灯、舵机控制、超声波库文件。
#include <Arduino.h>
#include "FastLED.h"
#include <Servo.h>
#include "Ultrasound.h"- 定义变量及创建对象
- 首先创建了蜂鸣器警报、功能模式、电压状态标志位,接着对小车控制变量进行了定义。在APP控制中可以设置小车的移动速度,通过
speed_update变量更新线速度,从而达到速度控制的效果。
static VoltageWarning g_warning = WARNING_OFF;
static CarMode g_mode = MODE_NULL;
static ReadVoltageState g_read = READ_VOLTAGE_ON;
static uint8_t g_state = 8; /* 接收的APP子指令 */
static uint8_t avoid_flag = 0; /* 避障模式开关标志位 */
static uint8_t rot_flag = 0; /* 转向标志位 */
static uint8_t beep_count = 0; /* 蜂鸣器鸣响次数 */
static int car_derection = 0; /* 设置小车移动的角度 */
static int8_t car_rot = 0; /* 设置小车角速度 */
static uint8_t speed_data = 0; /* 设置小车线速度 */
static uint8_t speed_update = 50; /* APP更新的线速度 */
/* 电压监测相关参数 */
static float voltage;
static int voltage_send;
static int last_voltage_send;
static int real_voltage_send;
static int error_voltage;- 接着定义了板载RGB灯引脚、板载按键引脚、以及电机的引脚。
const static uint8_t ledPin = 2;
const static uint8_t buzzerPin = 3;
const static uint8_t servoPin = 5;
const static uint8_t motorpwmPin[4] = { 10, 9, 6, 11} ;
const static uint8_t motordirectionPin[4] = { 12, 8, 7, 13};- 对PWM的频率以及周期进行了定义,用于控制电机。接着定于了用于控制非阻塞延时的变量,用于在不阻塞程序运行的情况下,实现延时功能。最后定义了用于存放舵机角度及超声波距离的变量。
const static int pwmFrequency = 500; /* PWM频率,单位是赫兹 */
const static int period = 10000000 / pwmFrequency; /* PWM周期,单位是微秒 */
const static uint32_t interval_us = 20000; /* 微秒计数时间间隔 用于非阻塞延时 */
const static uint32_t interval_ms = 1000; /* 毫秒计数时间间隔 用于非阻塞延时 */
static uint32_t previousTime_us = 0; /* 上一次的微秒计数时间间隔 用于非阻塞延时 */
static uint32_t previousTime_ms = 0; /* 上一次的毫秒计数时间间隔 用于非阻塞延时 */
static int increase_angle = 0; /* 设置舵机角度 */
static int default_angle = 90;
static uint16_t distance = 0; /* 超声波距离 */- 初始化设置
- 在setup()函数中,主要是串口进行初始化,将其通信的波特率设置为9600,接着使用FastLED库初始化扩展板上的RGB灯,并将其连接到ledPin引脚。通过
myservo.attach()函数绑定舵机引脚,并对舵机角度进行设置。随后调用tone()函数控制蜂鸣器鸣响一声。
void setup() {
Serial.begin(9600);
FastLED.addLeds<WS2812, ledPin, RGB>(rgbs, 1);
Motor_Init();
pinMode(servoPin, OUTPUT);
myservo.attach(servoPin); /* 绑定舵机指定引脚 */
myservo.write(default_angle + increase_angle); /* 写入舵机角度 */
tone(buzzerPin, 1200); /* 输出音调信号的函数,频率为1200 */
delay(100);
noTone(buzzerPin);- 最后读取ADC引脚电压,通过计算得出当前的电池电压值,将其存储到变量中用于后续蜂鸣器警报检测。
voltage_send = analogRead(A3)*0.02989*1000; /* 电压计算 */
last_voltage_send = voltage_send;
real_voltage_send = voltage_send;
}- 主函数
在主函数中循环运行Velocity_Controller()函数来更新小车当前的运动状态。调用了Task_Dispatcher()函数解析蓝牙数据,用于开启不同的玩法功能。最后通过Voltage_Detection()函数检测当前的电池电压,从而实现低电压蜂鸣器警报功能。
void loop() {
Velocity_Controller(car_derection, speed_data, car_rot);
Task_Dispatcher();
if(g_read == READ_VOLTAGE_ON)
{
Voltage_Detection();
}
}- 获取超声波数据
通过WireReadDataByte()函数向传感器获取当前的超声波距离,通过递推平均滤波法,将低位丢弃其余数据左移,最后返回一个距离数据的平均值。
int Ultrasound::Filter() {
int i;
int filter_sum = 0;
filter_buf[FILTER_N] = GetDistance();/* 读取超声波测值 */
for(i = 0; i < FILTER_N; i++) {
filter_buf[i] = filter_buf[i + 1];/* 所有数据左移,低位仍掉 */
filter_sum += filter_buf[i];
}
return (int)(filter_sum / FILTER_N);
}- 任务调度函数
- 在任务调度函数中,主要实现的是蓝牙数据解析,以及功能切换。这里根据协议对蓝牙数据进行处理,获取传输给主控板的功能号及数据。
/* 任务调度 */
void Task_Dispatcher(void)
{
uint8_t index = 0;
while (Serial.available() > 0)
{
String cmd = Serial.readStringUntil('$');
while (cmd.indexOf('|') != -1)
{
rec_data[index] = cmd.substring(0, cmd.indexOf('|')); /* 提取从开始到第一个逗号之前的子字符串 */
cmd = cmd.substring(cmd.indexOf('|') + 1); /* 更新字符串,去掉已提取的子字符串和逗号 */
index++; /* 更新索引 */
}
charArray = rec_data[0].c_str(); /* 转成C字符串形式 */- 通过对功能号进行解析,实现不同功能的切换,分别包含了摇杆&重力控制、发光超声波RGB灯控制、速度控制、舵机控制、超声波数据发送、避障玩法控制。
if(strcmp(charArray, "A") == 0 && avoid_flag == 0) /* 命令判断 */
{
g_mode = MODE_ROCKERANDGRAVITY;
}
if(strcmp(charArray, "B") == 0 && avoid_flag == 0)
{
g_mode = MODE_RGB_ADJUST;
}
if(strcmp(charArray, "C") == 0 && avoid_flag == 0)
{
g_mode = MODE_SPEED_CONTROL;
}
if(strcmp(charArray, "E") == 0 && avoid_flag == 0)
{
g_mode = MODE_SERVO_CONTROL;
}
if(strcmp(charArray, "D") == 0)
{
g_mode = MODE_ULTRASOUND_SEND;
}
if(strcmp(charArray, "F") == 0)
{
g_mode = MODE_AVOID;
avoid_flag = 1;
g_state = atoi(rec_data[1].c_str());
}
}- 根据不同的功能模式,切换对应的功能玩法,这里以摇杆&重力控制为例。切换至该功能玩法后,首先会执行对应的功能实现函数,然后将当前的功能模式清除,以便下一个功能的接收。
if(g_mode == MODE_ROCKERANDGRAVITY)
{
Rockerandgravity_Task();
g_mode = MODE_NULL;
}- 摇杆控制任务
在摇杆控制中,首先是解析并获取了蓝牙发送的命令数据,再根据命令数据设置小车运动的角度、角速度、线速度,从而控制小车进行移动。
void Rockerandgravity_Task(void)
{
g_state = atoi(rec_data[1].c_str());
// Serial.println(g_state);
switch (g_state)
{
case 0:
car_derection = 90;
// car_rot = 0;
speed_data = speed_update;
break;
case 1:
car_derection = 45;
// car_rot = 0;
speed_data = speed_update;
break;
case 2:
car_derection = 0;
// car_rot = 0;
speed_data = speed_update;
break;- 超声波RGB调节函数
通过解析蓝牙命令中的三个参数来设置RGB灯的颜色,atoi()函数是用于将字符串数据转换成int类型数据,r_data对应的是红色,g_data对应的是绿色,b_data则对应的是蓝色。R、G、B三种颜色的取值范围是0-255,最后通过ultrasound.Color()函数显示颜色。
void Rgb_Task(void)
{
uint8_t r_data,g_data,b_data;
r_data = (uint8_t)atoi(rec_data[1].c_str());
g_data = (uint8_t)atoi(rec_data[2].c_str());
b_data = (uint8_t)atoi(rec_data[3].c_str());
ultrasound.Color(r_data,g_data,b_data,r_data,g_data,b_data);
}- 电压监测函数
该函数主要是通过ADC读取电源电压,再对电压值进行判断,如果当前电压值<=7000mV,那么就使蜂鸣器进行鸣响,以达到低电压警报的效果。
void Voltage_Detection(void)
{
uint32_t currentTime_ms;
currentTime_ms = millis();
voltage = analogRead(A3)*0.02989; /* 电压计算 */
if(real_voltage_send <= 7000)
{
if(g_warning != WARNING_RGB)
{
g_warning = WARNING_BEEP;
}
}
if(g_warning == WARNING_BEEP)
{
if(currentTime_ms - previousTime_ms <= interval_ms/2)
{
tone(buzzerPin, 800); /* 电压小于7V蜂鸣器警报 */
}
else if (currentTime_ms - previousTime_ms > interval_ms/2 && currentTime_ms - previousTime_ms < interval_ms)
{
noTone(buzzerPin);
}
}- 机械爪控制函数
通过对蓝牙数据进行解析,获取APP传输的舵机角度,通过atoi()函数转换为int类型数据,再通过myservo.write()函数写入角度,即可控制舵机转动至相应的位置,达到控制机械爪的效果。
void Servo_Data_Receive(void)
{
increase_angle = atoi(rec_data[1].c_str());
myservo.write(default_angle + increase_angle);
}- 避障功能函数
在避障功能玩法中,首先需要获取发光超声波的距离,若当前距离<400mm时,就将角速度设置为100,控制小车原地旋转避开障碍物。若识别到障碍物距离>=500时,那么就控制小车以60的速度直行。
void Aovid(void)
{
distance = ultrasound.Filter();
if(g_state == 1)
{
if(distance < 400)
{
car_derection = 0;
car_rot = 100;
speed_data = 0;
}
if(distance >= 500)
{
car_derection = 0;
car_rot = 0;
speed_data = 50;
}
}
else if(g_state == 0)
{
car_derection = 0;
car_rot = 0;
speed_data = 0;
g_mode = NULL;
avoid_flag = 0;
}
}- 速度控制函数
在速度控制函数中,根据麦克纳姆轮的运动学分析进行计算各个电机的控制数值,angle参数用于设置小车的运动方向(车头的方向为0度,逆时针为正方向),velocity参数用于控制小车的速度,rot参数用于控制小车的自转方向(大于0为逆时针旋转,小于0为顺时针旋转),drift参数用于控制小车是否开启漂移功能。
/**
* @brief 速度控制函数
* @param angle 用于控制小车的运动方向,小车以车头为0度方向,逆时针为正方向。
* 取值为0~359
* @param velocity 用于控制小车速度,取值为0~100。
* @param rot 用于控制小车的自转速度,取值为-100~100,若大于0小车有一个逆
* 时针的自转速度,若小于0则有一个顺时针的自转速度。
* @param drift 用于决定小车是否开启漂移功能,取值为0或1,若为0则开启,反之关闭。
* @retval None
*/
void Velocity_Controller(uint16_t angle, uint8_t velocity,int8_t rot)
{
int8_t velocity_0, velocity_1, velocity_2, velocity_3;
float speed = 1;
angle += 90;
float rad = angle * PI / 180;
if (rot == 0) speed = 1;///< 速度因子
else speed = 0.5;
velocity /= sqrt(2);
velocity_0 = (velocity * sin(rad) - velocity * cos(rad)) * speed + rot * speed;
velocity_1 = (velocity * sin(rad) + velocity * cos(rad)) * speed - rot * speed;
velocity_2 = (velocity * sin(rad) - velocity * cos(rad)) * speed - rot * speed;
velocity_3 = (velocity * sin(rad) + velocity * cos(rad)) * speed + rot * speed;
Motors_Set(velocity_0 + 10, velocity_1, velocity_2, velocity_3);
}- 电机控制函数
通过速度控制函数中计算所得的各个电机的控制数值,对各个电机进行pwm控制。motors数组用于将各个电机的速度值映射为pwm值,pwm_set数组用于控制给各个电机输出的pwm值。
/**
* @brief PWM与轮子转向设置函数
* @param Motor_x 作为PWM与电机转向的控制数值。根据麦克纳姆轮的运动学分析求得。
* @retval None
*/
void Motors_Set(int8_t Motor_0, int8_t Motor_1, int8_t Motor_2, int8_t Motor_3)
{
int8_t pwm_set[4];
int8_t motors[4] = { Motor_0, Motor_1, Motor_2, Motor_3};
bool direction[4] = { 1, 0, 0, 1};///< 前进 左1 右0
for(uint8_t i; i < 4; ++i)
{
if(motors[i] < 0) direction[i] = !direction[i];
else direction[i] = direction[i];
if(motors[i] == 0) pwm_set[i] = 0;
else pwm_set[i] = abs(motors[i]);
digitalWrite(motordirectionPin[i], direction[i]);
PWM_Out(motorpwmPin[i], pwm_set[i]);
}
}