4. APP使用说明
4.1 手机APP安装
苹果用户:直接在App Store搜索“Wonderbot”,下载即可。
安卓用户:可在本节同目录找到“Wonderbot”安装包或者扫描下方二维码,将其安装到手机。

4.2 手机APP连接
NOTE
APP使用前,请先在手机设置中开启蓝牙与定位服务。
请通过APP内的蓝牙按钮与设备进行配对连接,请勿在手机设置里通过密钥的形式进行配对。
将小车开机,打开手机APP“Wonderbot”,点击左上角的
 图标选择机器人类型,在此处选择“miniAuto”。
图标选择机器人类型,在此处选择“miniAuto”。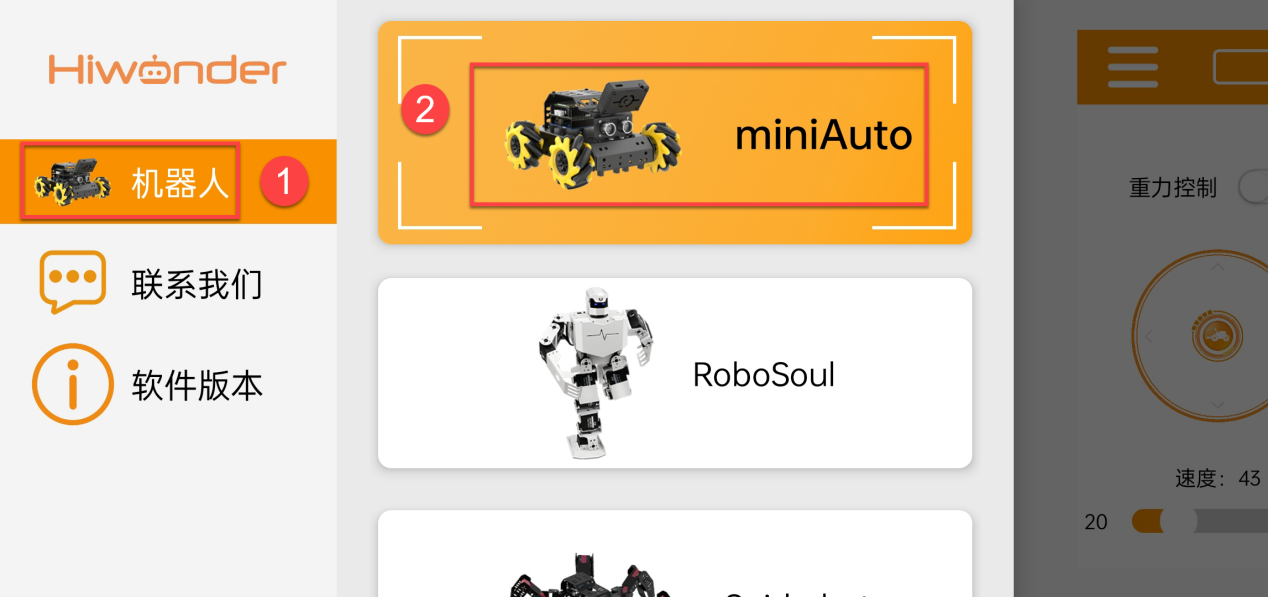
选择后,进入玩法界面,点击右上角闪烁的
 图标,并在蓝牙列表中找到“Hiwonder”,然后点击连接。
图标,并在蓝牙列表中找到“Hiwonder”,然后点击连接。
NOTE
若未看到“Hiwonder”的名称,请点击“重新搜索”来查找设备。
连接成功后,右上角蓝牙图标将保持长亮,同时左侧将显示电池电量。

4.3 功能介绍
4.3.1 运动控制
通过按钮可控制miniAuto的运动。该界面分为了两部分,如下所示:

- 菜单栏
| 图标 | 功能描述 |
|---|---|
 | 返回主界面选择机器人类型 |
 | 实时显示当前的电池电量 |
 | 打开图像回传功能 |
 | 蓝牙连接 |
 | 更多信息 |
- 控制区
| 图标 | 功能描述 |
|---|---|
 | 开启/关闭重力控制模式 |
 | 拖动摇杆可控制小车朝各个方向平移 |
 | 调节小车的移动速度 |
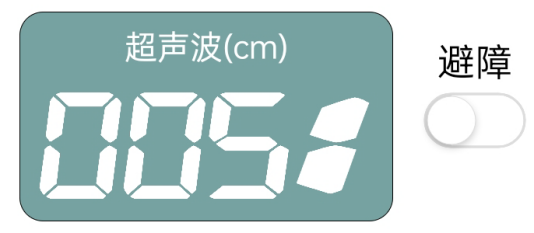 | 显示超声波探测距离,点击避障按钮,开启超声波避障 |
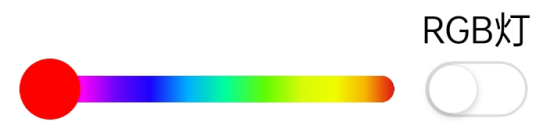 | 调节超声波RGB彩灯颜色 |
 | (豪华版功能)控制机械爪开合 |
 | (豪华版功能)控制机械爪回归初始姿态 |
 | 控制小车左右转 |
4.3.2 图像回传
点击右上角的
图标可查看实时图像回传。首先点击“连接热点”。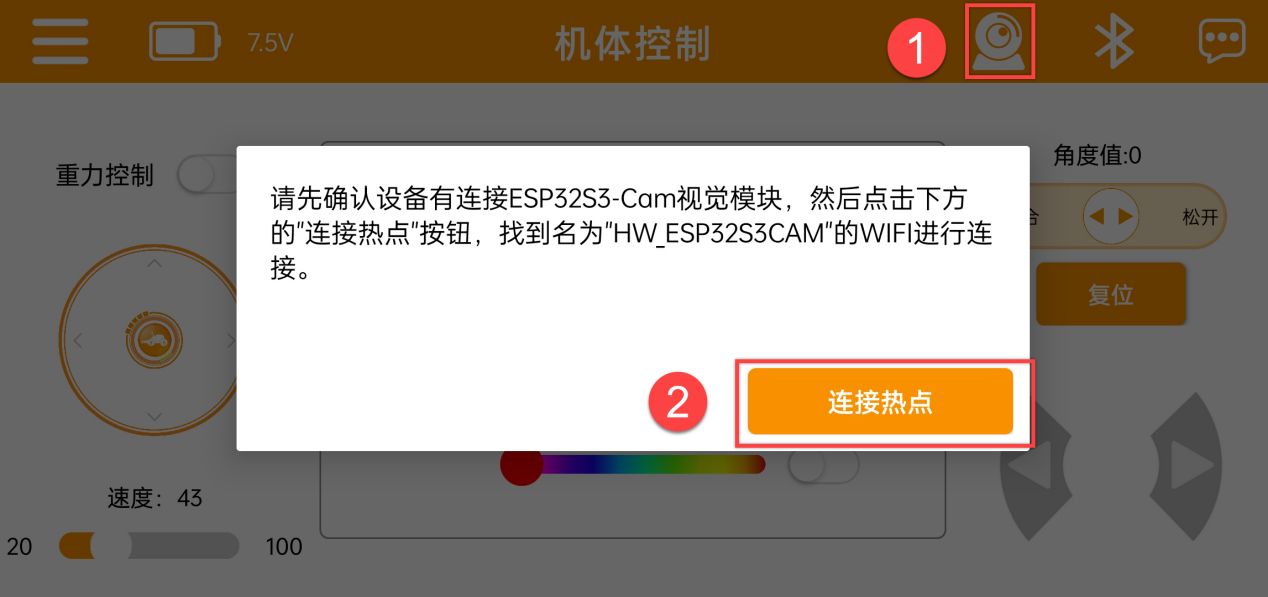
在手机Wi-Fi设置中找到“HW_ESP32S3CAM”,点击连接。
返回APP界面,进入图传模式,即可查看当前的实时图传画面。
